Case 22: Balls Tracking with TPBot
Contents
3. Case 22: Balls Tracking with TPBot#
3.1. Purpose#
Use TPBot to build a ball-tracking car.
3.2. Materials required#
1 x TPBot

1 x AI Lens

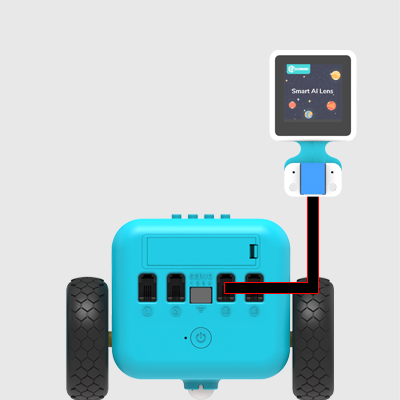
3.3. Hardware Connections#
Connect the AI Lens to the IIC port on TPBot.
3.4. Software#
3.5. MakeCode Programming#
Click “Advanced” to see more choices in the MakeCode drawer.
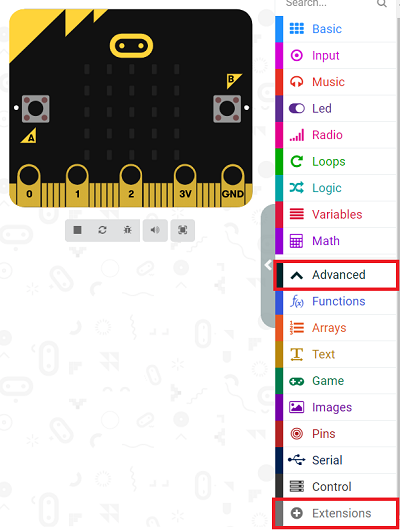
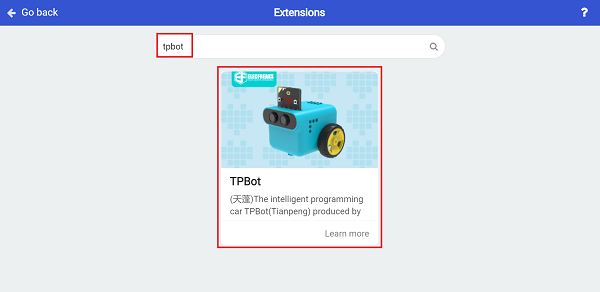
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and seach with “tpbot” in the dialogue box to download it.
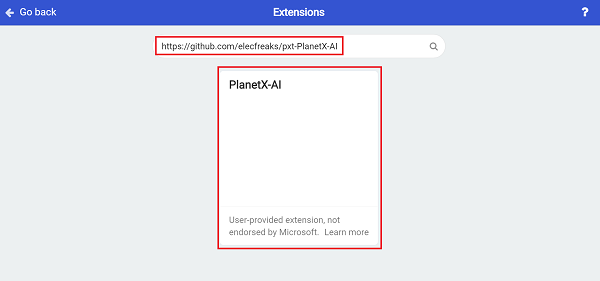
We need to add a package for programming the AI Lens kit. Click “Extensions” in the bottom of the drawer and seach with
https://github.com/elecfreaks/pxt-PlanetX-AIin the dialogue box to download it.
Sample Code#
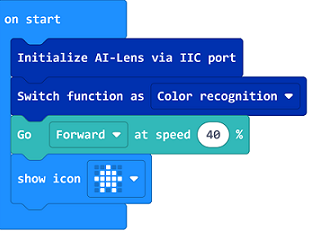
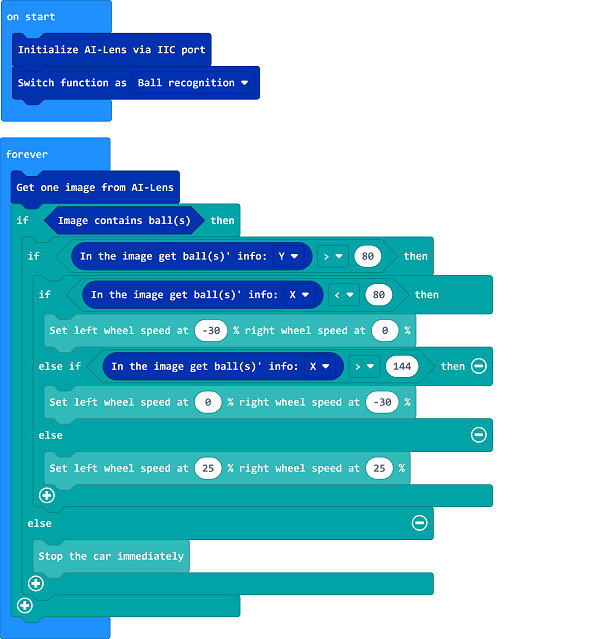
Initialize the AI lens kit in the On start brick and switch its function to balls recognition.
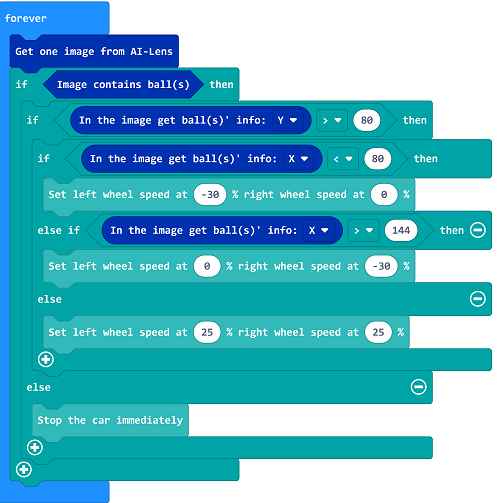
In forever brick, get an image from the AI lens and adjust TPBot’s movement by the balls recognized in the lens.
Complete code:
Link#
You may also download it directly here:
3.6. Python Programming#
Add TPBot extension: https://www.elecfreaks.com/learn-cn/microbitKit/TPbot_tianpeng/TPbot-python.html
Add AI Lens extension: https://www.elecfreaks.com/learn-cn/microbitplanetX/ai/Plant-X-EF05035-python.html
Code#
from microbit import *
from AILens import *
from TPBot import *
tp = TPBOT()
ai = AILENS()
# Set the function of AI Lens in balls recognition
ai.switch_function(Ball)
while True:
# Get an image
ai.get_image()
buff = ai.get_ball_data()
# "buff[1]" means the Y coordinates data of the ball detected in AI lens
if (buff[1] > 80):
# "buff[0]" means the X coordinates data of the ball detected in AI lens
if (buff[0]< 80):
tp.set_motors_speed(-30,0)
elif (buff[0] > 144):
tp.set_motors_speed(0,-30)
else:
tp.set_motors_speed(25,25)
else:
tp.set_motors_speed(0,0)
Result#
The TPBot moves with the ball and it stops while walking in the right front of the ball.
3.7. Exporation#
3.8. FAQ#
Q: TPBot doesn’t work with the sample code.
A: It is probably due to the lack of battery power, please try adding the speed of the TPBot or replacing with new batteries.
Q: The AI Lens is not working, and it does not go to the function page with the sample code.
A: Please try replacing with new batteries.