case 01 Full speed ahead
Contents
11. case 01 Full speed ahead#
11.1. Our Goal#
To make the Ring:bit Car to go ahead and reverse.
11.2. Requiered Materials#
1 x Ring:bit Car
11.3. Hardware Connect#
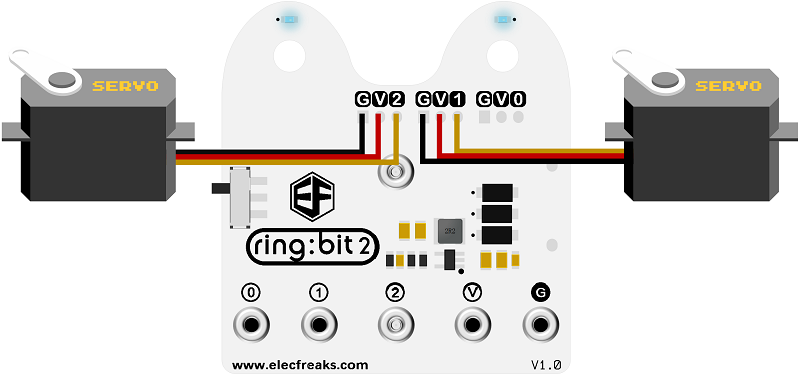
Connect the left wheel servo to P1 of the Ring:bit expansion board and the right wheel servo to P2.
11.4. Software#
11.5. Coding#
Step 1#
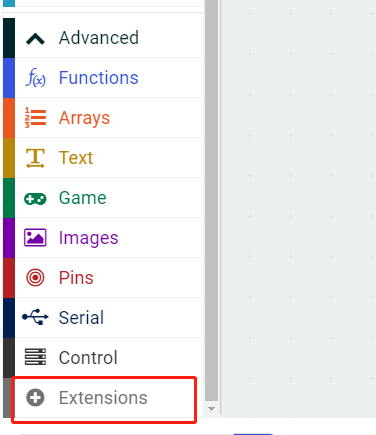
Click on “Advanced” in the MakeCode Drawer to see more code sections.
Search for “ringbitcar” and click on the ring:bit car package to add it to your project. (As below picture)
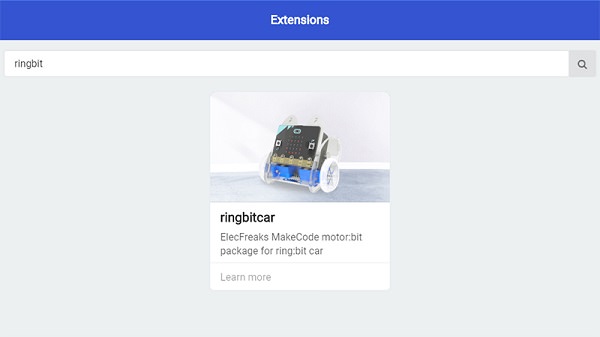
Note: If you get a warning telling you some packages will be removed because of incompatibility issues, either follow the prompts or create a new project in the Project file menu.
Step 2#
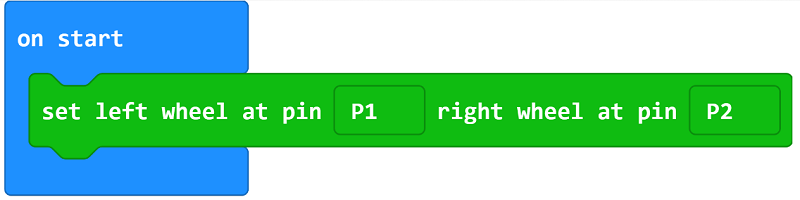
Snap the block
go straight at full speedinto theOn startblock.The port number is based on the actual servo connection port.
Step 3#
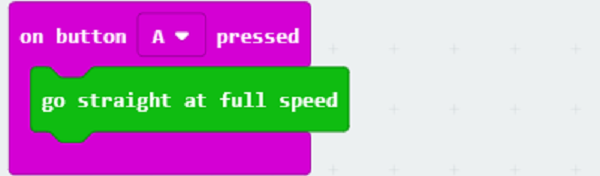
Snap the
go straight at full speedblock into theon button A pressedblock.
Step 4#
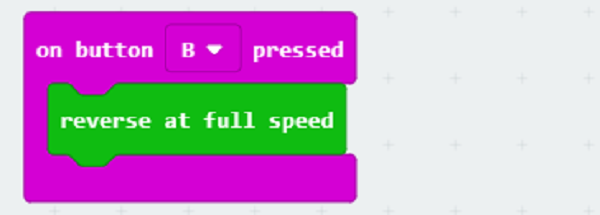
Snap the
reverse at full speedblock into theon button B pressedblock.
Program#
Program Link:https://makecode.microbit.org/_5md9ofDyRigh
If you don’t want to type these code by yourself, you can directly download the whole program from the link below:
11.6. Completed!#
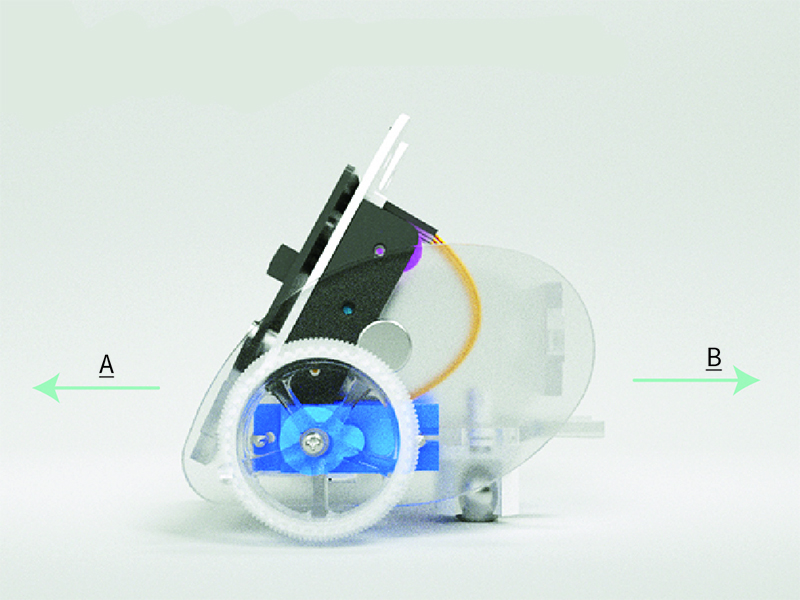
When button A is pressed, the car will go straight at full speed.
When button B is pressed, the car will reverse at full speed.
11.7. Think#
How can you make your car to stop when button A is pressed ?