Introduction to Cutebot
Contents
1. Introduction to Cutebot#
1.1. Introduction#
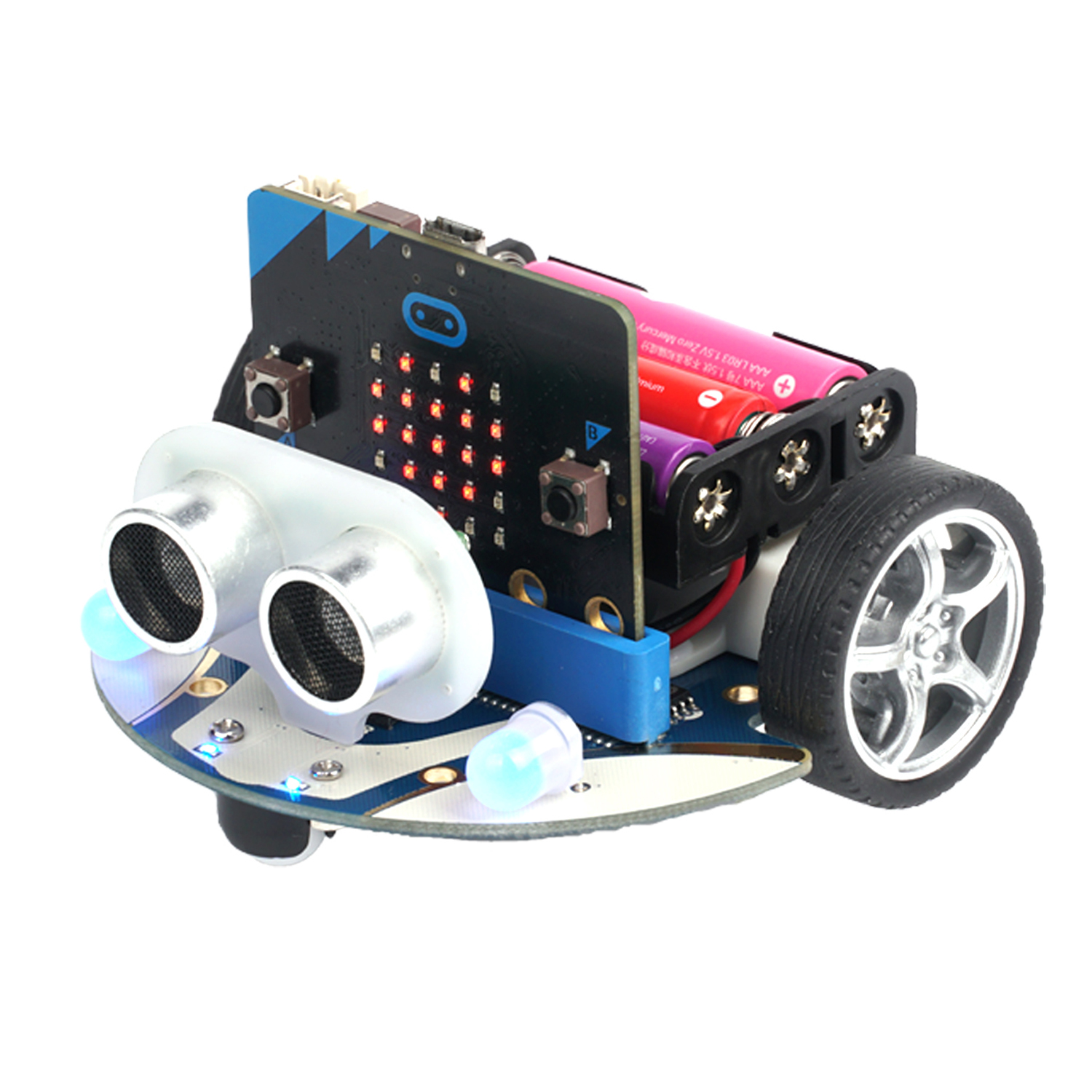
ELECFREAKS Cutebot is a rear-drive smart car driven by dual high speed motors.
There are many on-board equipments on the Cutebot including ultrasonic sensor and distance sensor, two RGB LED headlights and clearance lamps on the bottom, two line-tracking probes, an active buzzer as the horn and so on! Let’s drive your first smart car!
1.2. Characteristics#
Rear-drive high speed motors featuring strong power.
Tiny structure with an arc shape featuring crashproof and confortable feel.
Only batteries and ultrasonic sensor need to be assembled featuring easy installation.
1.3. Pictures#
1.4. Parameters#
| Items | Parameter |
|---|---|
| Working Voltage | 3.5V — 5V |
| Dimension | 85.68mm X 85.34mm X 38.10mm |
| Infrared Control | Connect to P16 |
| RGB Headlights | 2 x RGB |
| Rainbow LED | 2 x RainbowLED connect to P15 |
| Connection | IIC Port(P19,P20)、Servo Port(S1, S2)、Ultrasonic Port、P1、P2(GVS lead-out) |
| Motor Type | GA12-N20 DC micro gear deceleration motor(300 RPM) |
| Ultrasonic Sensor Type | HC-SR04(2cm-400cm Contactless distance detection, precision ±1.5mm) |
1.5. Main Modules Introduction#
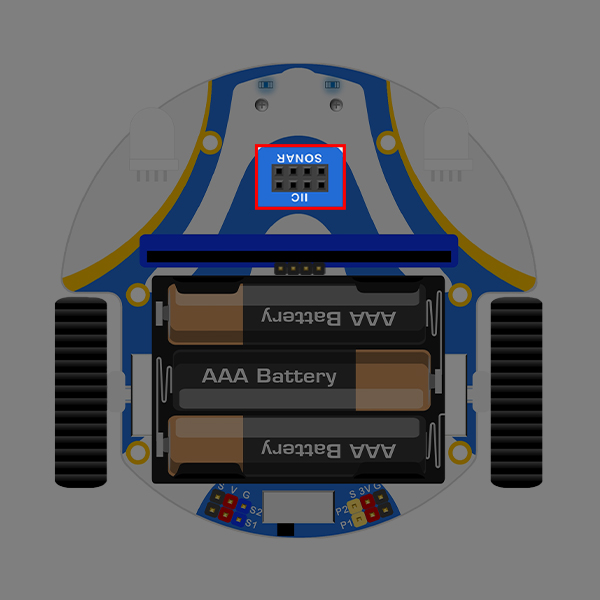
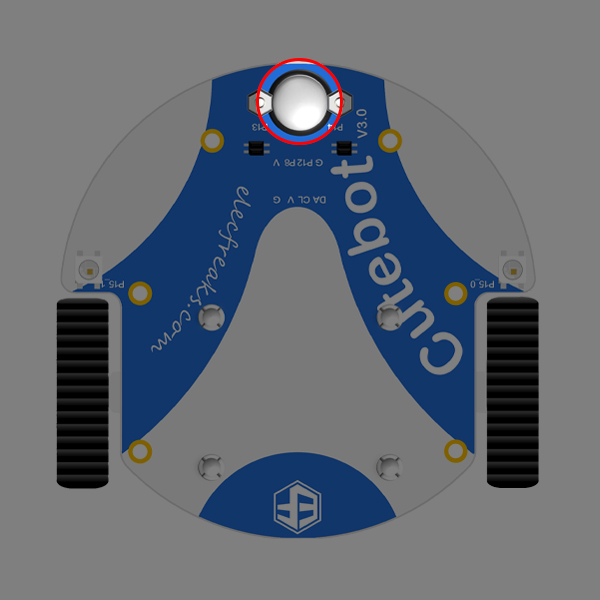
Ultrasonic connection and micro:bit IIC port are placed in the front part of the Cutebot.
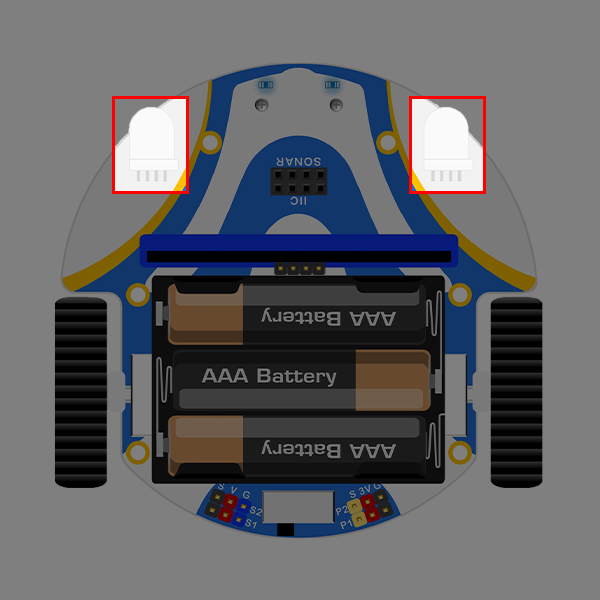
Two full color RGB lights controlled by the expansion board are placed on both side of the front part.
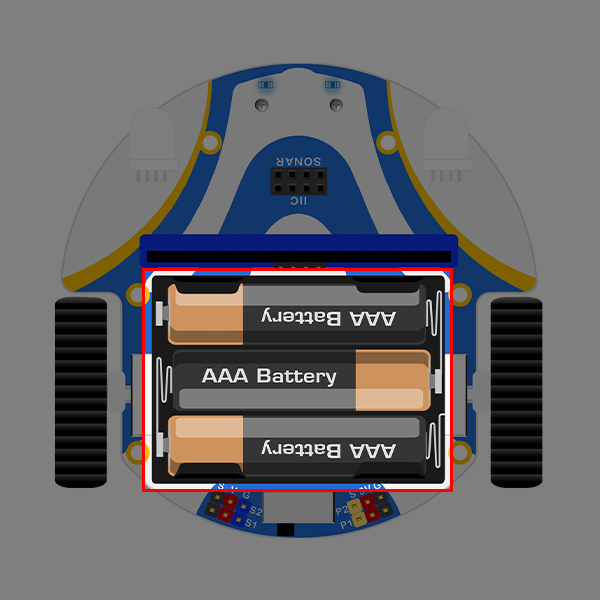
An expansion board for 3x AA batteries is placed in the right above part of the Cutebot.
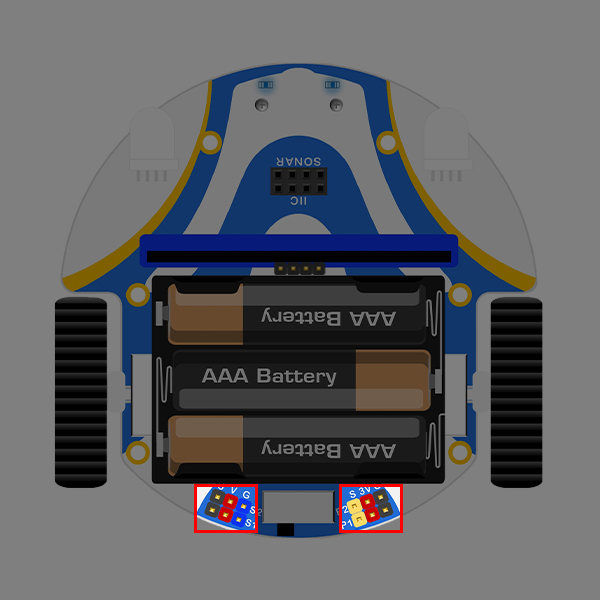
The IIC port and Servo Port(S1, S2), P1,P2 IO connections are equipped in the battery expansion board.
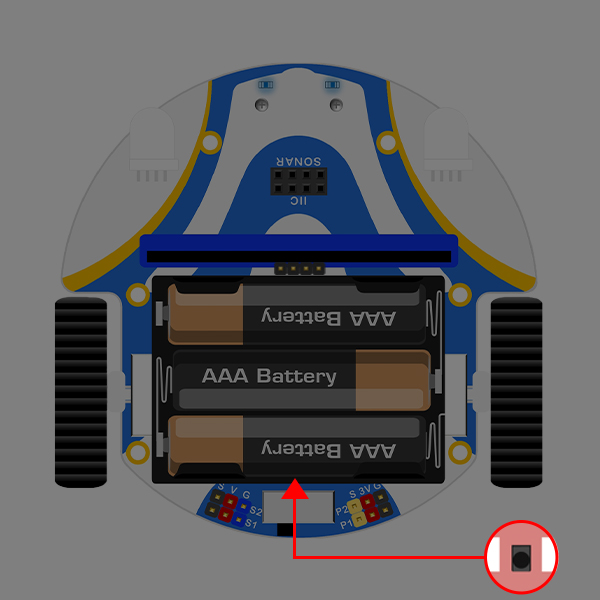
The infrared probes connecting to P16 port of the micro:bit are placed on the tail part of the Cutebot.
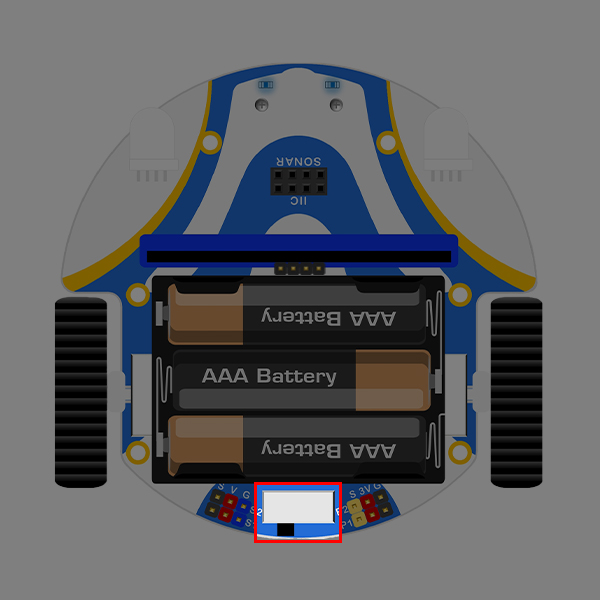
The master switch are placed besides the infrared probes and with on/off status showing by the LED.
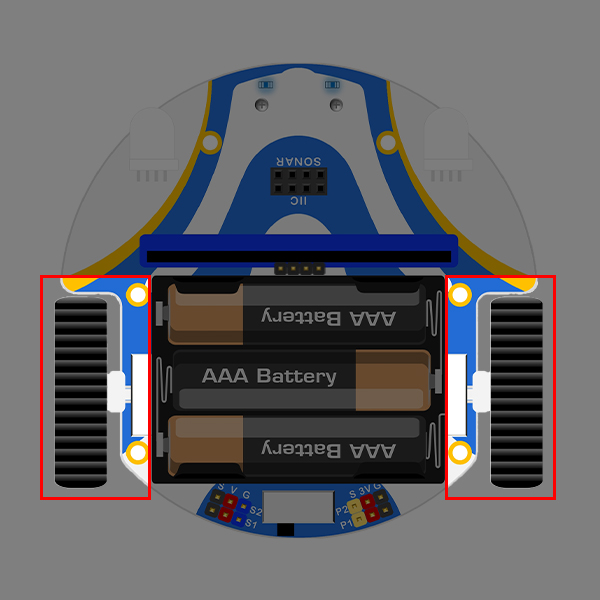
The two wheels on both side are driven by DC micro gear deceleration motors(300 RPM).
The two line-tracking probes connecting to P13&P14 on the micro:bit are used to detect the black line and its edges.

A universal wheel is placed in the front bottom of the Cutebot, an all-direction drive can be realized by the different speed of the left and right wheels.
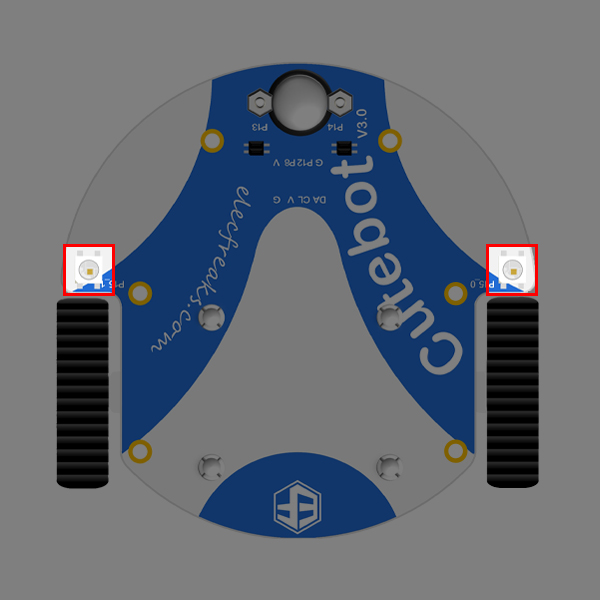
The two full color Rainbow LEDs programmed by Rainbow LED connecting to P15 on the micro:bit are placed on both bottom side of the Cutebot and can be used as the clearance lamps or others.
1.6. Components list#
1 x Cutebot car
1 x Battery Holder
1 x HC-SR04 Ultrasonic Sensor
1 x Line-tracking Map
1 x Brochure