Case 12: micro:bit Remote Control
Contents
15. Case 12: micro:bit Remote Control#
15.1. Purpose#
Programme to use the mciro:bit to control the TPBot.
15.2. Material#
1 x TPBot

15.3. Software#
15.4. Programming#
Click “Advanced” to see more choices in the MakeCode drawer.
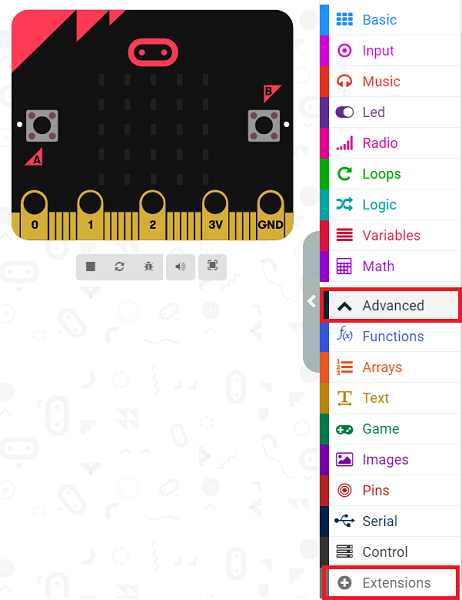
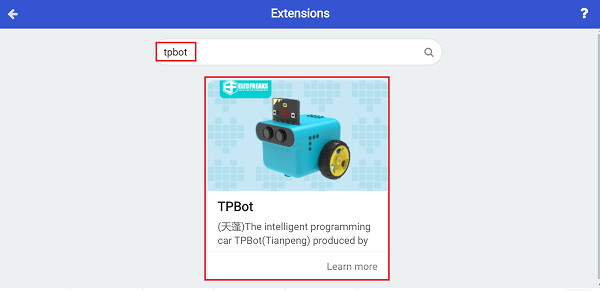
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “tpbot” in the dialogue box to download it.
Sample#
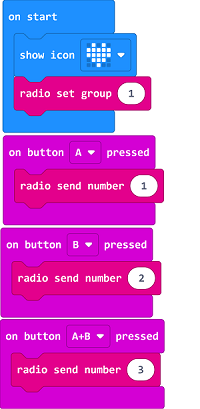
Remote Control Part#
Set the micro:bit showing a set icon and the radio group as 1.
After pressing button A, radio send number 1; after pressing button B, radio send number 2; after pressing button A+B, radio send number 3.
Link#
You may also download it directly below:
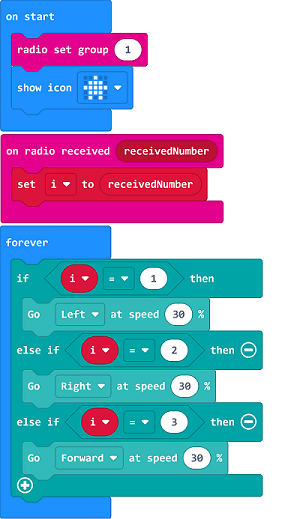
Receiving Part#
Set the micro:bit showing a set icon and the radio group as 1.
Save the received number as the variable.
Judge if the variable is 1, if yes, set the TPBot turning left at the speed of 30%; if the variable is 2, set the TPBot turning right at the speed of 30%; if the variable is 3, set the TPBot moving forward at the speed of 30%.
Link#
You may also download it directly below:
Conclusion#
Power up to show a set icon on the micro:bit, after pressing button A, it turns left; after pressing button B, it turns right; after pressing button A+B, it moves forward.
15.5. Exploration#
15.6. FAQ#
Q: The car does not work with the code in the wiki.
A: It should be the batteries that are lack of power, please try to fix it by adding the value of the speed in the code.