Case 12: Remote Control the Cutebot with micro:bit Accelerometer
Contents
16. Case 12: Remote Control the Cutebot with micro:bit Accelerometer#
16.1. Purpose#
Use the accelerometer in another micro:bit to remote control the Cutebot for the direction and speed.
Both of the micro:bit need to be programmed.
16.2. Materials#
1 x Cutebot Kit
1 x micro:bit
16.3. Software Platform#
16.4. Programming#
Step 1#
Click the “Advanced” to see more choices in the MakeCode drawer.
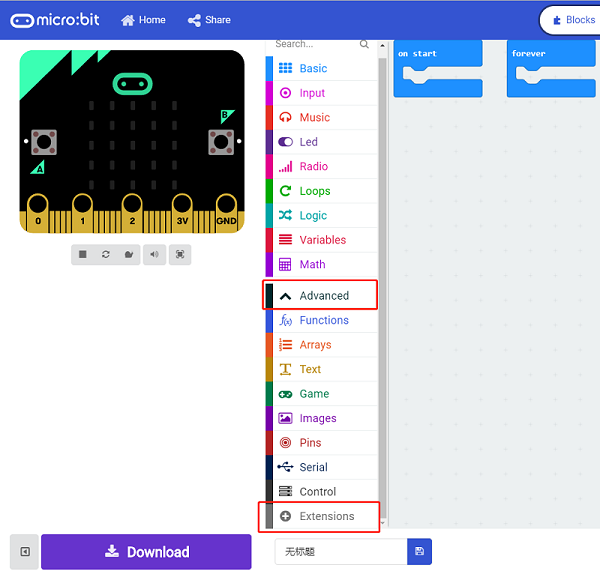
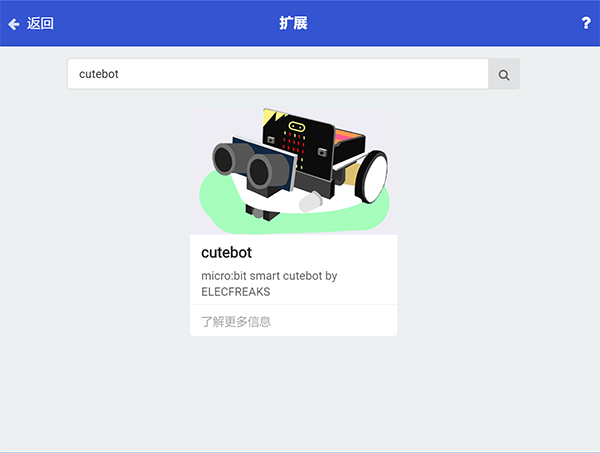
A codebase is required for Cutebot programming, click “Add Package” at the bottom of the drawer, search
Cutebotin the dialogue box and download it.
Note: If you met a tip indicating incompatibility of the codebase, you can continue with the tips or build a new project there.
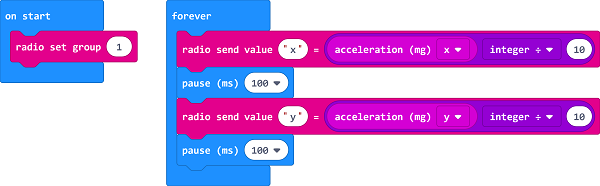
Step 2: Remote Control Programming#
Set “radio set group” to
1in theOn startbrick.Set
xwhose value is given by “acceleration (mg) x” exactly divides10to the radio value inforeverbrick.Set
ywhose value is given by “acceleration (mg) y” exactly divides10to the radio value inforeverbrick.The scope of the acceleration value is
0~1024, which can be regarded roughly as the speed value in0~100after dividing10.
Programming#
Links: https://makecode.microbit.org/_Pv01m2ehfcKT
You can also download it directly below:
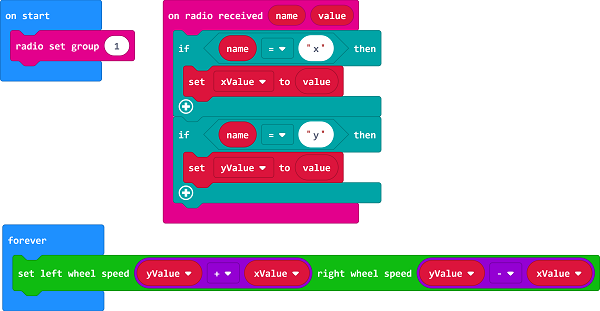
Step 3: Cutebot Programming#
Set the “radio set group” to
1in theOn startbrick. Items must be the same with the remote control for the correct match.Drag two “if” bricks into the
on radio receivedbrick and judge if the radio revived valuenameisxoryIf the radio received value
nameisx, it is the data forXand then save thevaluein the variablexValue.If the radio received value
nameisy, it is the data foryand then save thevaluein the variableyValue.In
foreverbrick, set the left wheel speed toyValue+xValueand right wheel speed toyValue-xValue.
Programming#
Links: https://makecode.microbit.org/_VYxbiCVtE962
You can also download it directly below: