Motor Fan Module(EF05014)
Contents
15. Motor Fan Module(EF05014)#
15.1. Introduction#
It is a simple motor-drived fan module.
15.2. Products Link#
15.3. Characteristic#
Designed in RJ11 connections, easy to plug.
15.4. Specification#
| Item | 参数 |
|---|---|
| SKU | EF05014 |
| Connection | RJ11 |
| Type of Connection | Analog input |
| Working Voltage | 3.3V |
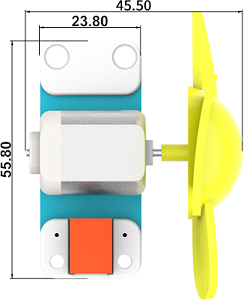
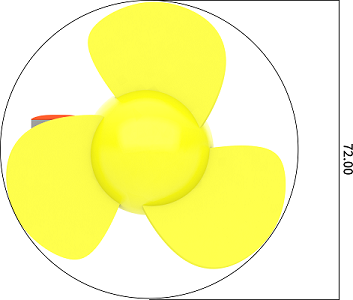
15.5. Outlook#
15.6. Quick to Start#
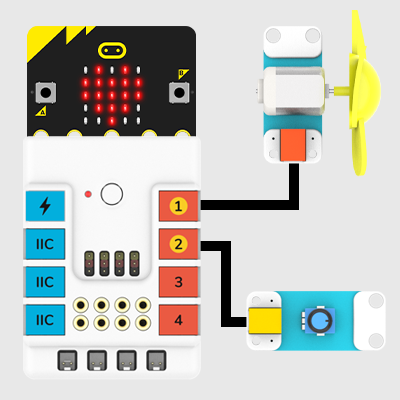
15.6.1. Materials Required and Diagram#
Connect the Motor fan module to J1 port and the potentiaometer to J2 port in the Nezha expansion board as the picture shows.
15.7. MakeCode Programming#
15.7.1. Step 1#
Click “Advanced” in the MakeCode drawer to see more choices.
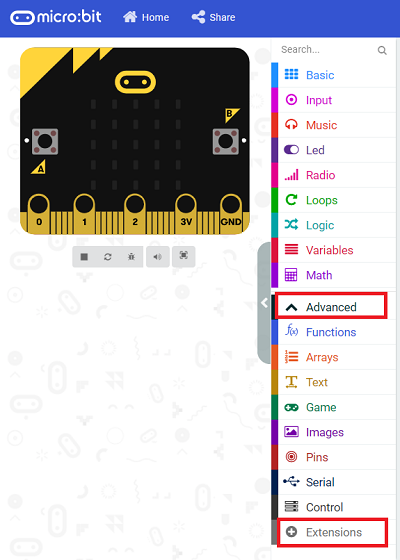
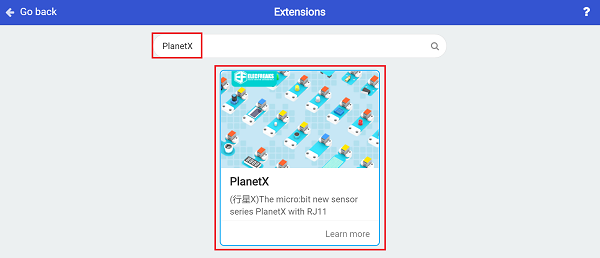
We need to add a package for programming, . Click “Extensions” in the bottom of the drawer and search with “PlanetX” in the dialogue box to download it.
Note: If you met a tip indicating that the codebase will be deleted due to incompatibility, you may continue as the tips say or build a new project in the menu.
15.7.2. Step 2#
15.7.3. Code as below:#

15.7.4. Link#
Link: https://makecode.microbit.org/_A8ma6p0s7bR7
You may also download it directly below:
15.7.5. Result#
The rotation speed of the fan is adjusted by the potentiometer.
15.8. Python Programming#
15.8.1. Step 1#
Download the package and unzip it: PlanetX_MicroPython
Go to Python editor
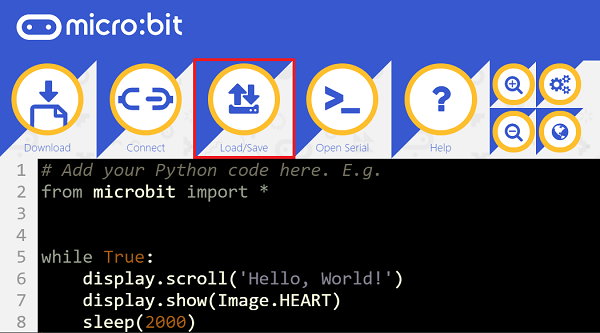
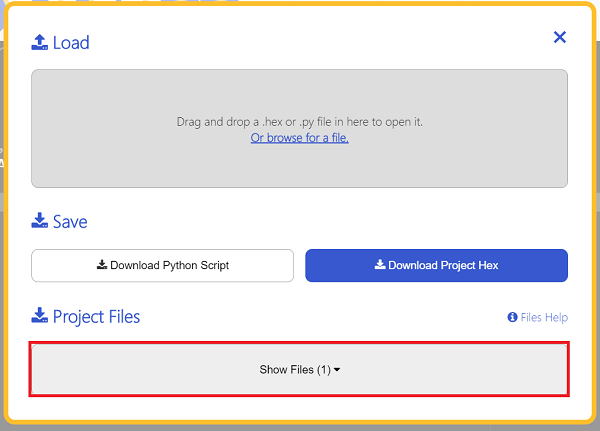
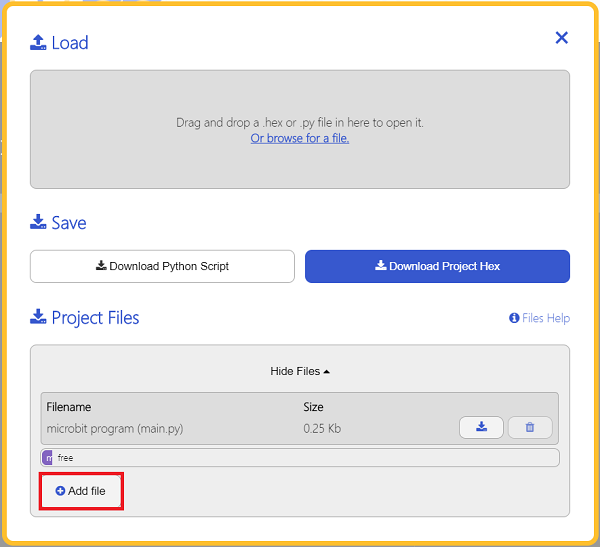
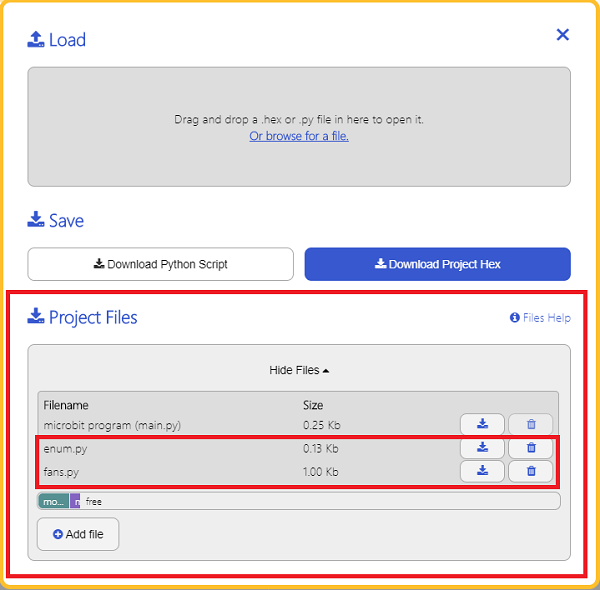
We need to add enum.py and fans.py for programming. Click “Load/Save” and then click “Show Files (1)” to see more choices, click “Add file” to add enum.py and fans.py from the unzipped package of PlanetX_MicroPython.
15.8.2. Step 2#
15.8.3. Reference#
from microbit import *
from enum import *
from fans import *
fans = FANS(J1)
while True:
fans.set_fans(1,100)
sleep(3000)
fans.set_fans(1,50)
sleep(3000)
fans.set_fans(0)
sleep(3000)
15.8.4. Result#
After powering on, the Motor fan module rotates for 3 seconds at the speed of 100% first and then at the speed of 50% for another 3 seconds, and finally stops for 3 seconds.