Case 09: Autonomous Obstacle Avoidance
Contents
13. Case 09: Autonomous Obstacle Avoidance#
13.1. Purpose#
The Cutebot avoids the obstacles automatically to move forward.
13.2. Materials#
1 x Cutebot Kit
1 x Ultrasonic Sensor
13.3. Software Platform#
13.4. Programming#
Step 1#
Click the “Advanced” to see more choices in the MakeCode drawer.
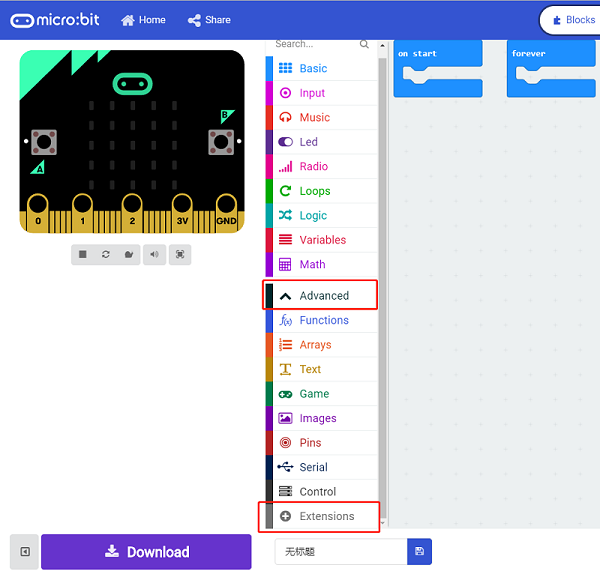
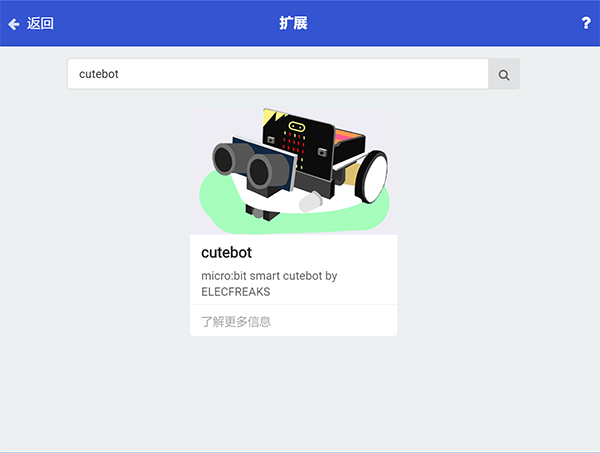
A codebase is required for Cutebot programming, click “Add Package” at the bottom of the drawer, search
Cutebotin the dialogue box and download it.
Note: If you met a tip indicating incompatibility of the codebase, you can continue with the tips or build a new project there.
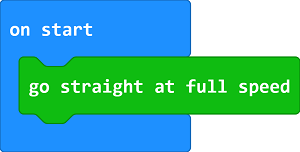
Step 2#
Drag “go straight at full speed” brick into the
On startbrick.
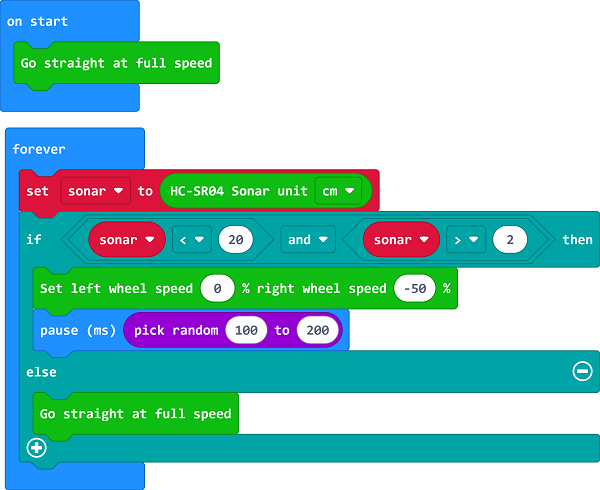
Step 3#
Set a
Sonarvariable to save the detectedCmvalue in theForeverbrick.If the detected value is between
2and20which means there is obstacle being detected in the front 20cm far, set the left wheel speed to0and right to-50, make a right turn at a random time to complete an obstacle avoidance.If not, move forward at its full speed.
Programming#
Links: https://makecode.microbit.org/_TaE1uEVfvb8z
You can also download it directly below:
13.5. Result#
The Cutebot moves forward at its full speed and will make a right turn to keep going if any obstacle being detected.
13.6. Exploration#
Why should the detected value be over 2cm ?
13.7. FAQ#
Q: After connecting the Sonar:bit, the Cutebot doesn’t work.
A: Please have a check on the connections of the Sonar:bit, make sure that you connect to the SR04 connection rather than the IIC.