Case 10: Car Following with A Fixed Distance
Contents
14. Case 10: Car Following with A Fixed Distance#
14.1. Purpose#
The Cutebot moves with a fixed distance between the car and your hands.
14.2. Materials#
1 x Cutebot Kit
1 x Ultrasonic Sensor
14.3. Software Platform#
14.4. Programming#
Step 1#
Click the “Advanced” to see more choices in the MakeCode drawer.
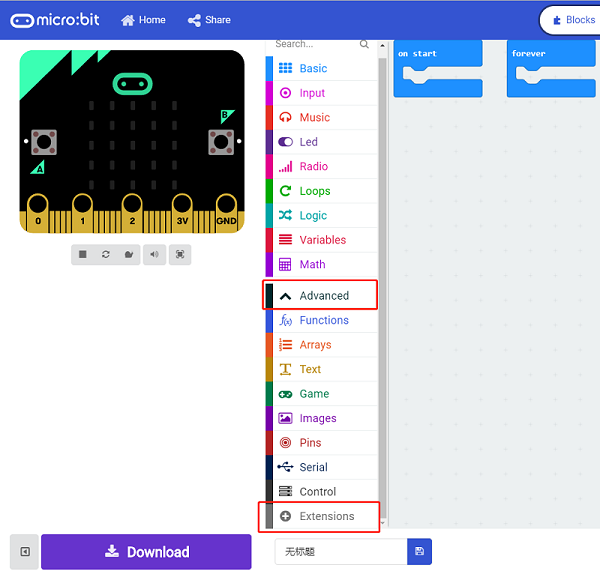
A codebase is required for Cutebot programming, click “Add Package” at the bottom of the drawer, search
Cutebotin the dialogue box and download it.
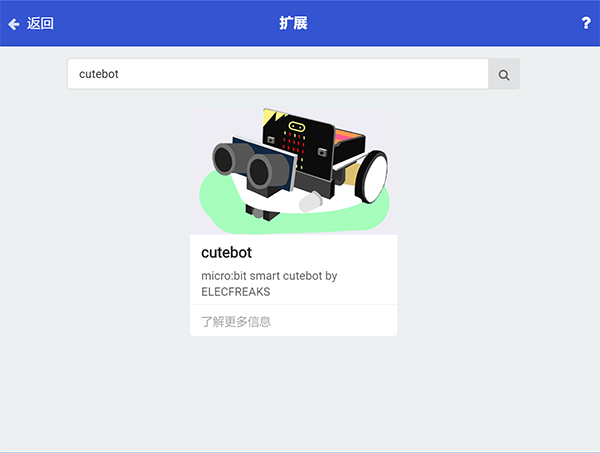
Note: If you met a tip indicating incompatibility of the codebase, you can continue with the tips or build a new project there.
Step 2#
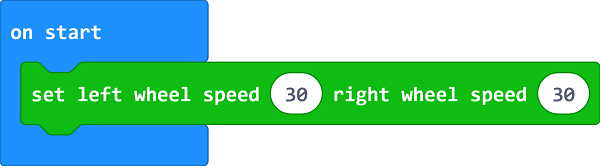
Drag the “set left wheel speed and right wheel speed” into the
On startbrick.
Step 3#
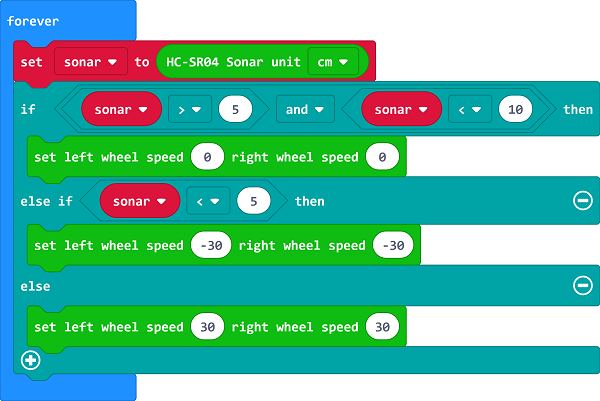
Set a
Sonarvariable to save the detectedCmvalue in theForeverbrick.If the detected value is between
5and10, the car stops moving.If the detected value is below
5, the car reverses because of the short distance with the hands.If not any, the car moves forward to catch up with the hands because of the far distance with the hands and then stay still .
Programming#
Links: https://makecode.microbit.org/_YxxfyPVsmHjg
You can also download it directly below:
14.5. Result#
The Cutebot adjusts itself to keep a fixed distance with your hands.