Case 08:Servo
Contents
10. Case 08:Servo#

10.1. Introduction#
Servo is a position (angle) servo drive, suitable for those control systems that require a constant change of angle and can be maintained. In this lesson, we will use Pico:ed to control the servos to cycle through the travel range.
10.2. Products Link#
10.3. Components List:#
Hardware:#
1 × Pico:ed
1 × USB Cable
1 × Breadboard Adapter
1 × Transparent Breadboard - 83 * 55 mm
1 x TowerPro SG-90 Mini Servo
n x Breadboard Jumper Wire 65pcs Pack
10.4. Major Component Introduction#
Servo#
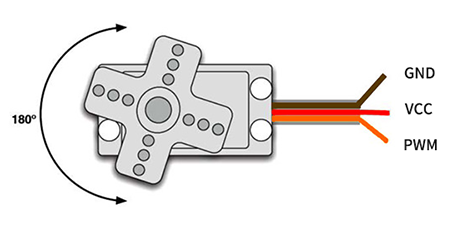
The steering gear is an automatic control system composed of a DC motor, a reduction gear set, a potentiometer, and a control circuit. Specify the output shaft rotation angle by sending a signal. Generally speaking, the steering gear has a maximum rotation angle (such as 180 degrees). The main difference from the ordinary DC motor is that the DC motor rotates in circles, and the steering gear can only rotate within a certain angle, not in a circle (the digital steering gear can be switched between the steering gear mode and the motor mode, without this question). Ordinary DC motors cannot feed back rotational angle information, but servos can. The uses are also different. Ordinary DC motors are generally used for full rotation for power, and steering gears are used to control an object to rotate at a certain angle, such as the joints of a robot. The servo system of the steering gear is controlled by pulses of variable width, and the control line is used to transmit the pulses. Pulse parameters are minimum, maximum, and frequency. Generally speaking, the reference signal of the servo is 20ms in period and 1.5ms in width. The position defined by this reference signal is the intermediate position. The steering gear has a maximum rotation angle, and the definition of the middle position is that the amount from this position to the maximum angle and the minimum angle is board import the same. The most important point is that the maximum rotation angle of different servos may be different, but the pulse width at the middle position is certain, that is, 1.5ms.

There are many specifications for servos, but all servos have three external wires, which are distinguished by three colors: brown, red, and orange (different brands may have slightly different colors), brown is the ground wire, and red is the positive pole of the power supply line, orange is the signal line.
10.5. Experimental Procedure#
Hardware Connection#
Connect your components according to the picture below:
Connect the servo to the P1 port of the expansion board
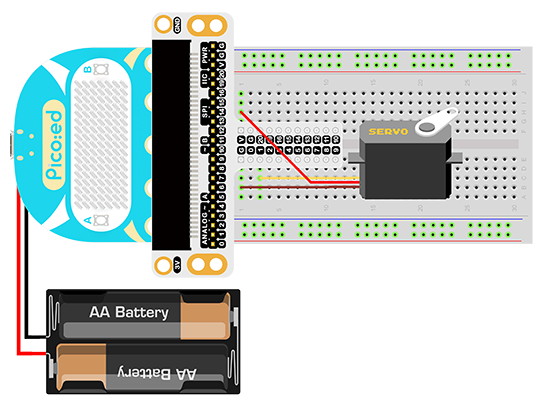
You would see as below after you finish the connection:
10.6. Software Programming#
For programming environment preparation, please refer to Introduction to the programming environment
Program as the picture shows:#
# Import the modules that we need
import time
import board
import pwmio
from adafruit_motor import servo
# Set the pins of the servo and create the servo object
pwm = pwmio.PWMOut(board.P1_A1, duty_cycle=2 ** 15, frequency=50)
my_servo = servo.Servo(pwm)
# Cyclic rotation the servo
while True:
for angle in range(0, 180, 5):
my_servo.angle = angle
time.sleep(0.05)
for angle in range(180, 0, -5):
my_servo.angle = angle
time.sleep(0.05)
Details for the code:#
1.Support modules are required by the importer. The board module is a generic container for pin names. could use the board module to specify the pin to use. The digitalio module contains classes that provide access to basic digital IO. The time module contains functions for time settings.
import time
import board
import pwmio
from adafruit_motor import servo
2.Set the pins of the servo and create the servo object.
pwm = pwmio.PWMOut(board.P1_A1, duty_cycle=2 ** 15, frequency=50)
my_servo = servo.Servo(pwm)
If you are using pins other than P0_A0 and P1_A1, you can enter the following code in the shell window below the Thonny editor and press Enter to view the numbers of other pins.
>>> import board
>>> help(board)
object <module 'board'> is of type module
__name__ -- board
board_id -- elecfreaks_picoed
BUZZER_GP0 -- board.BUZZER_GP0
I2C0_SDA -- board.BUZZER_GP0
I2C0_SCL -- board.I2C0_SCL
BUZZER -- board.BUZZER
BUZZER_GP3 -- board.BUZZER
P4 -- board.P4
P5 -- board.P5
...
3.Use infinite loop to set the servo to rotate back and forth between 0 and 180 degrees.
while True:
for angle in range(0, 180, 5):
my_servo.angle = angle
time.sleep(0.05)
for angle in range(180, 0, -5):
my_servo.angle = angle
time.sleep(0.05)
10.7. Result#
We can see the servo rotates with angle range from 0 degree to 180 degree.
10.8. Exploration#
If we want to make a pointer thermometer with a temperature sensor and a servo, how should we design the circuit and program it?