Case 13: Remote Control with micro:bit Accelerometer
Contents
16. Case 13: Remote Control with micro:bit Accelerometer#
16.1. Purpose#
Programme to control the TPBot with the accelerometer.
16.2. Material#
1 x TPBot

16.3. Software#
16.4. Programming#
Click “Advanced” to see more choices in the MakeCode drawer.
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “tpbot” in the dialogue box to download it.
Sample#
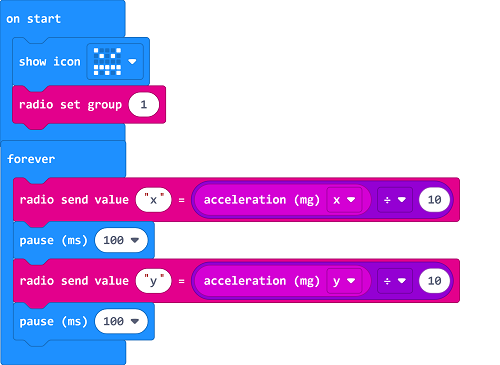
Remote Control Part#
Set the micro:bit showing a set icon and the radio group as 1.
Radio send x which is given by its acceleration dividing 10 in the forever brick.
Radio send y which is given by its acceleration dividing 10 in the forever brick.
Link#
You may also download it directly below:
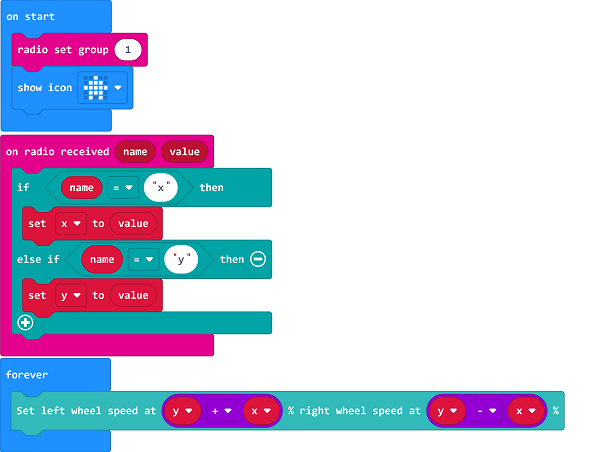
Receiving Part#
Set the micro:bit showing a set icon and the radio group as 1.
Drag two” if…else…” sentences to the “on radio received…” block, judge if the received name is x or y.
If it’s x, save it as the variable as the accelaration from the x.
If it’s y, save it as the variable as the accelaration from the y.
Set the speed of the left wheel being y+x and the right wheel being y-x.
Link#
You may also download it directly below:
Conclusion#
Power up to show the set icon on the micro:bit display, and the movement of TPBot is controlled by the changing angel from the micro:bit.