Drone:bit-Python Sample
Contents
4. Drone:bit-Python Sample#
4.1. Add Python File#
For programming the Drone:bit with Python, we can use the existed extensionEF_Produce_MicroPython-master, we only need to use the function and revise the parameters to achive the goals.
Download the package and upzip it: EF_Produce_MicroPython-master
Go to Python editor
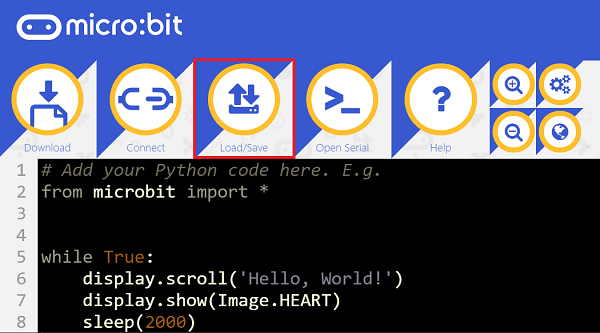
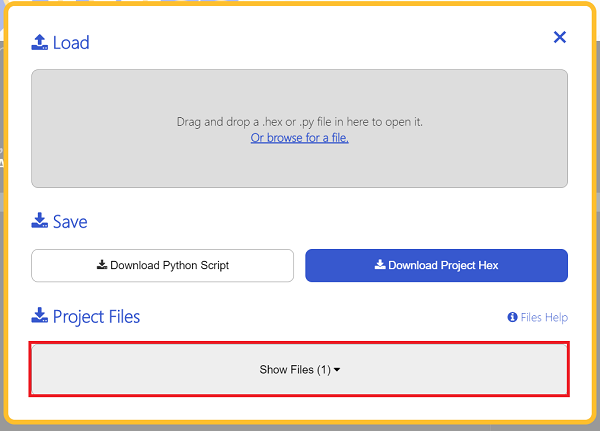
For programming the Drone:bit, we nned add the Dronebit.py. Click Load/Save and click Show Files(1) to see more choices.
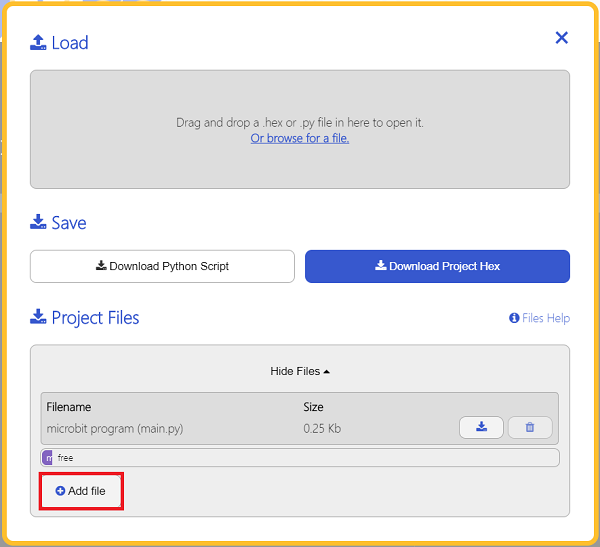
Click Add file to find the folder of EF_Produce_MicroPython-master, add the Dronebit.py .
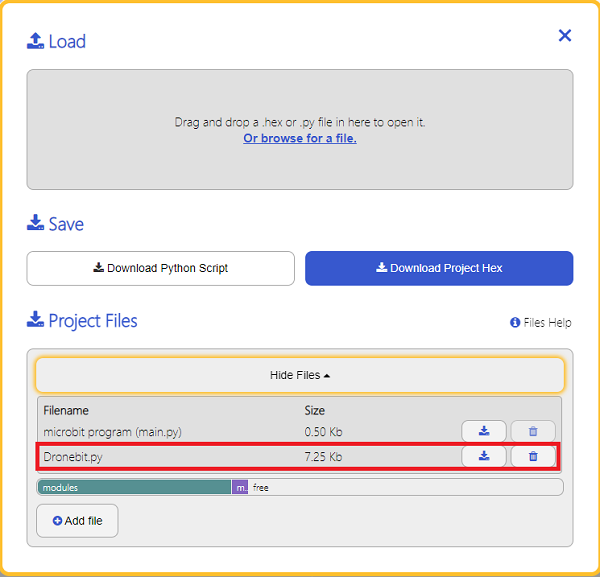
Dronebit.py is added successfully.
4.2. API#
DRONE(object)
Create the object.
heartbeat(self)
The heartbeat function, maintain the connection between the micro:bit and the Drones while running the program, send the heartbeat command every second and the program needs to be included in the main loops.
Drone_sleep(self,time_ms)
The delay function, for the replacement of sleep(), it contains the command of heartbeat.
initModule(self,mode)
Initialize the Drone:bit, inspect the power status and select the mode, the device shall alert after initialization.
`mode`Select the drone mode:
`DRONE.master`Master mode,
`DRONE.remote`Remote mode.
UAV_speed(self,power)
The motivation settings, which means to set the speed of the drones.
Basic_action(self,basicstate)
Execute the basic actions, such as taking off and landing.
`basicstate`Actions commands
`DRONE.take_off`Taking off,
`DRONE.take_off`Landing.
Move_action(self,Directionstate,distance)
Execute the move commands.
`Directionstate`Movement commands:
`DRONE.Up`Up,
`DRONE.Down`Down,
`DRONE.Forward`Forward,
`DRONE.Backward`Backward,
`DRONE.Left`Fly left,
`DRONE.Right`Fly right;
`distance`Distances of movement:
Unit: CM,
Up: 0~200,
Down: 0~200,
Other movements: 0~500
Rotation_action(self,rotationstate,angle)Execute the rotating commands.
`rotationstate`Actions commands:
`DRONE.turn_left` Turn left,
`DRONE.turn_right`Turn right;
`angle`Rotation angels:
Ranges: 0~360.
Hovering(self,time)Time of hovering
`time`Time of hovering:
Range: 0~200.
Get_voltage(self)Get the voltage of the drone,
Get_height(self)Get the height of the drone.
4.3. Samples Code#
from microbit import *
from Dronebit import *
Drone = DRONE()
Drone.initModule(Drone.master)
Drone.Basic_action(Drone.take_off)
Drone.Move_action(DRONE.Up,300)
Drone.Drone_sleep(1000)
Drone.Move_action(DRONE.Down,300)
Drone.Drone_sleep(1000)
Drone.Basic_action(Drone.landing)
while True:
Drone.heartbeat()
if button_a.was_pressed():
Drone.Basic_action(Drone.take_off)
Drone.Move_action(Drone.Forward,300)
Drone.Drone_sleep(1000)
Drone.Move_action(Drone.Left,300)
Drone.Drone_sleep(1000)
Drone.Move_action(Drone.Backward,300)
Drone.Drone_sleep(1000)
Drone.Move_action(Drone.Right,300)
Drone.Drone_sleep(1000)
Drone.Hovering(10)
Drone.Basic_action(Drone.landing)
Reult#
After powering on, the drone starts taking off, then going upward and downward, finally landing on the ground. Then press button A on the micro:bit and the drone would take off again and fly at a square routine, then it lands on the ground.