Expansion:Line-following Module
Contents
6. Expansion:Line-following Module#
6.1. Introduction#
Ring:bit car V2 line following module is a dedicated module designed for the Ring:bit car V2, it is easy to be installed to achieve the line following function for the Ring:bit car V2.
Equipped with double infrared probes, it can detect the distance between 2~12mm accurately and it can achieve the function of line following around the circles, the detection of the black lines and the detection of the edge.
6.2. Features#
The micro:bit can drive it directly with the input voltage of this module in 3V~5V.
It only needs one IO port it with standard 3-pin GVS ports.
It uses the infrared light to detect with a strong anti-interference capability.
6.3. Parameter#
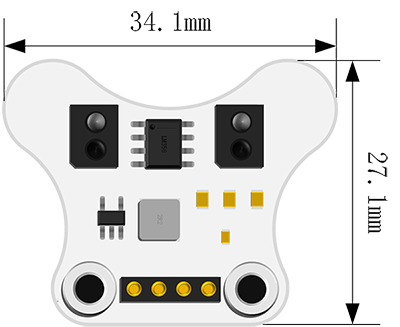
| Items | Parameter | Notes | | — | — | — | | Name | Ring:bit car V2 line following module | - | | SKU | EF03424 | - | | Working Voltage | DC 3-5V | - | | Port | Ring:bit car dedicated pin ports | Fixed by screws | | Types of Output Signal | Simulation | - | | Effective Distance | 2~12mm | - | | Dimension | 34.15 x 27.20mm | - | | Net Weight | 4.7g | - |
6.4. Outlook and Dimensions#
6.5. Quick to Start#
Hardware Connections#
The first step is to insert this module to the baseboard of the Ring:bit car V2,The next step is to fix the module with the two screws,Completed.
6.6. Programming#
Preparation for Programming: Info
Sample Code#
# Import modules that we need
import board
from ringbit import *
from time import *
# Set the pins of both wheels
ringbit = Ringbit(board.P1, board.P2)
# Set the speed of the cars
ringbit.set_speed(100, 100)
# Read the value from the line-following module and set the speed to be controlled with the values.
while True:
value = ringbit.get_tracking(board.P0)
if value == 10:
ringbit.set_speed(0, 100)
sleep(0.1)
elif value == 01:
ringbit.set_speed(100, 0)
sleep(0.1)
elif value == 11:
ringbit.set_speed(100, 100)
sleep(0.1)
Details of the Code#
1.Import the modules that we need. board is the common container, and you can connect the pins you’d like to use through it; ringbit module contains classes and functions for Ring:bit smart car operations, the time module contains functions for time operations.
import board
from ringbit import *
from time import *
2.Set the pins of both wheels
ringbit = Ringbit(board.P1, board.P2)
3.Set the speed of the car
ringbit.set_speed(100, 100)
4.Read the value from the line-following sensor and set the value of speed according to the value.
while True:
value = ringbit.get_tracking(board.P0)
if value == 10:
ringbit.set_speed(0, 100)
sleep(0.1)
elif value == 01:
ringbit.set_speed(100, 0)
sleep(0.1)
elif value == 11:
ringbit.set_speed(100, 100)
sleep(0.1)
Result#
The car could run along with the map through this sensor, does your Ring:bit car look the same as the following picture suggests?