Expansion-Sonar:bit
Contents
5. Expansion-Sonar:bit#
5.1. Introduction#
Sonar:bit is a 3-wire ultrasonic module with the working voltage between 3-5V. It is available to be used to 3.3V or 5V micro-controller system. With only one 3-wire(GVS) cable, it can work properly. Compared to the normal 4-wire ultrasonic module, it has saved one IO port.
The measurement range of sonar:bit is 4cm-400cm. It can output stable and accurate measurement data with ±1cm tolerance only.
It can connect to the Ring:bit with an expansion board.

5.2. Features#
Input voltage:3V~5V and can be driven by micro:bit directly.
Standard 3-wire GVS connecotr, which occupies 1 IO port only.
5.3. Parameter#
| Item | Parameter | Note |
|---|---|---|
| Name | Ring:bit Car v2 Sonar:bit | |
| SKU | EF04089 | |
| Working Voltage | DC 3-5V | |
| Connections | 3pin GVS Connection | |
| Output signal | Analog | |
| Measurement | 4~400cm | |
| Size | 40.60×51.60mm | |
| NW | 12g |
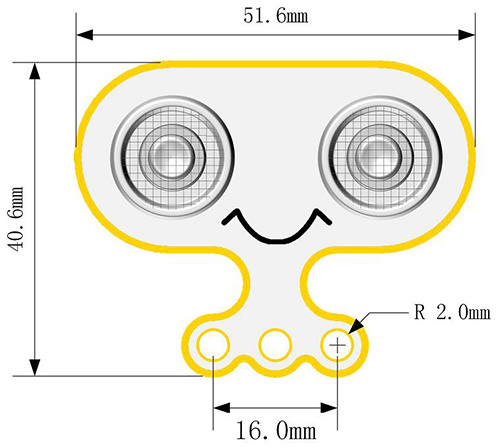
5.4. Outlook and Dimensions#
5.5. Quick to Start#
Hardware Connections#
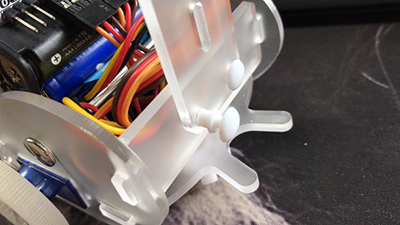
Connect the acrylic transition board to the back board with the rivets.
Connect the Sonar:bit to the other side of the acrylic transition board with rivets.
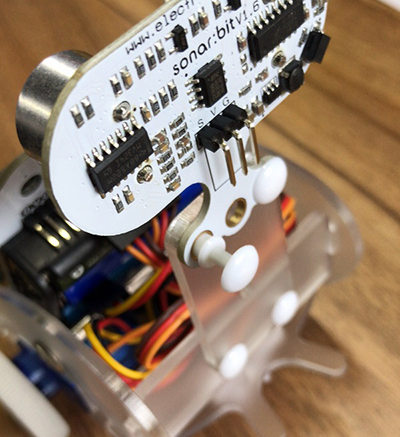
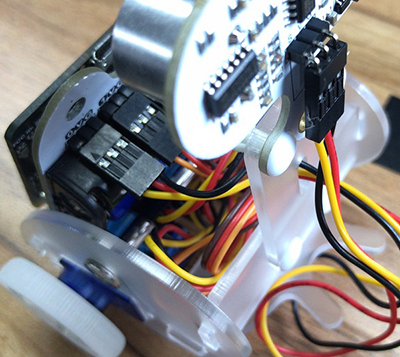
Connect the Sonar:bit to the Ring:bit breakout board with a 3-pin wire.
5.6. Programming#
Preparation for Programming: Info
Samples Code#
# Import modules that we need
import board
from ringbit import *
# Set the pins of both wheels
ringbit = Ringbit(board.P1, board.P2)
# Change the speed in accordance with the distances detected by the sonar:bit
while True:
if ringbit.get_distance(board.P0, Unit.cm) > 20:
ringbit.set_speed(100, 100)
else:
ringbit.set_speed(0, 0)
Details of the program#
1.Import the modules that we need. board is the common container, and you can connect the pins you’d like to use through it; ringbit module contains classes and functions for Ring:bit smart car operations.
import board
from ringbit import *
2.Set the pins of the servos
ringbit = Ringbit(board.P1, board.P2)
3.While true, set the speed to be controlled by the distance value given by the sonar:bit
while True:
if ringbit.get_distance(board.P0, Unit.cm) > 20:
ringbit.set_speed(100, 100)
else:
ringbit.set_speed(0, 0)
5.7. Result#
The Ring:bit car drives normally when there are no obstacles, stops when there are obstacles, and continues to drive when the obstacles leave.