Case 01: Hovering at A Defined Altitude
Contents
5. Case 01: Hovering at A Defined Altitude#
5.1. Introduction#
Program to make the micro:bit Drone:bit Kit take off and hover for 10 seconds, then it lands to the ground.
5.2. Products Link#
1 x Drone:bit Kit
5.3. Picture#

5.4. Software Programming#
Click “Advanced” in the MakeCode drawer to see more choices.
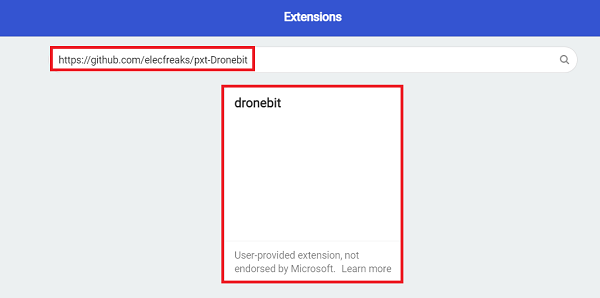
For programming, we need to add a package: click “Extensions” at the bottom of the MakeCode drawer and search with “https://github.com/elecfreaks/pxt-Dronebit” in the dialogue box to download it.
Notice: If you met a tip indicating that some codebases would be deleted due to incompatibility, you may continue as the tips say or create a new project in the menu.
5.5. Program#
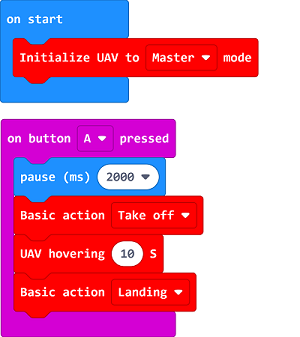
Notice: It is suggested to pause for 2 seconds or longer after triggering the take-off command to make sure the operator run away from the drones in case of any hurting accidents.
Link: https://makecode.microbit.org/_cu82jPKtwa2E
You can also download it directly:
5.6. Result#
The micro:bit Drone:bit Kit takes off and hovers for 10 seconds, then it lands to the ground.
5.7. FAQ#
Notice: For better locating of the drones, a complicated groud is prefered. If the groud is in single color, the drones might not locate them well.