两路巡线模块电子积木
Contents
5. 两路巡线模块电子积木#
5.1. 简介#
两路巡线模块电子积木集成了两组反射式红外对管,可通过它来识别黑线。通常应用该模块来做巡线智能小车,我们可以任意设计黑线轨迹,通过编程使小车按我们设计的黑线轨迹行驶。
5.2. 特性#
利用红外光探测,抗干扰能力强。
定位孔尺寸兼容主流小车底盘。
两个3P带锁杜邦接口和一个4P焊盘,能够直接用两个GVS线连接连接两个3P杜邦接口,接线十分方便。
5.3. 参数#
| 项目 | 参数 |
|---|---|
| 品名 | 两路巡线电子积木 |
| SKU | EF04088 |
| 工作电压 | DC 3-5V |
| 接口 | 两个标准G-V-S接口 |
| 输出信号类型 | 数字 |
| 黑线输出电平 | 低电平 |
| 白线输出电平 | 高电平 |
| 有效距离 | 2~12mm |
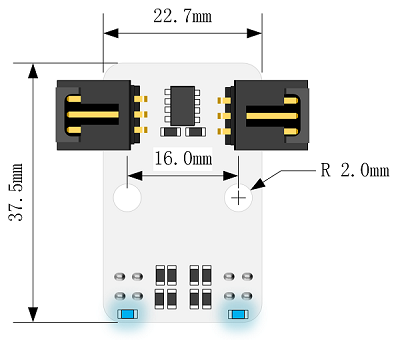
| 尺寸 | 22.74 x 37.45mm |
| 净重 | 4.8g |
外型与定位尺寸#
5.4. 包装清单#
1 x Octopus 2 Channel Tracking Module。
2 x 3P的GVS杜邦连接线
5.5. 快速上手#
硬件连接#
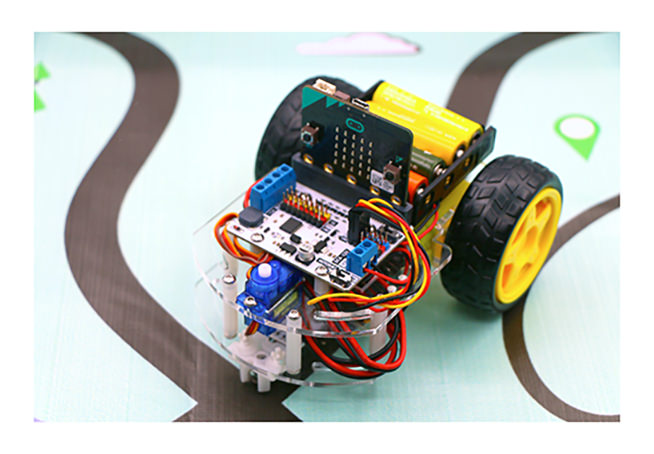
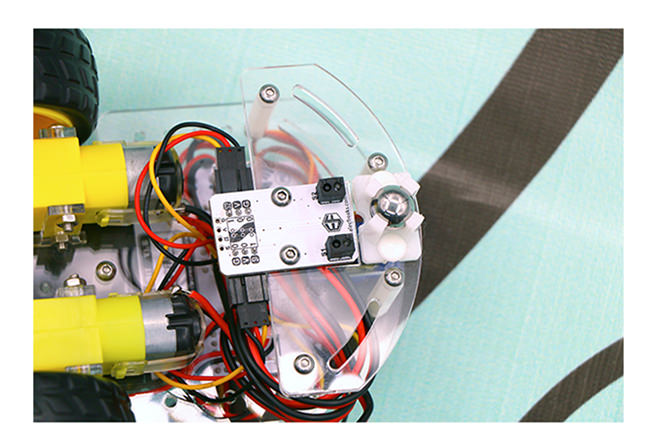
将模块安装在motor:bit小车上。 将左边的接口接入P13,右边的接口接入P14。(均以驾驶员视角为参照)
Micro:bit 示例代码#
程序链接:https://makecode.microbit.org/_A5zAEjRw3Ez2 你也能通过以下页面直接下载该程序。
结果#
将小车放在黑线轨迹上,打开开关,小车便沿着黑线轨迹行驶。
5.6. Python 编程#
步骤 1#
下载压缩包并解压Octopus_MicroPython-master 打开Python editor
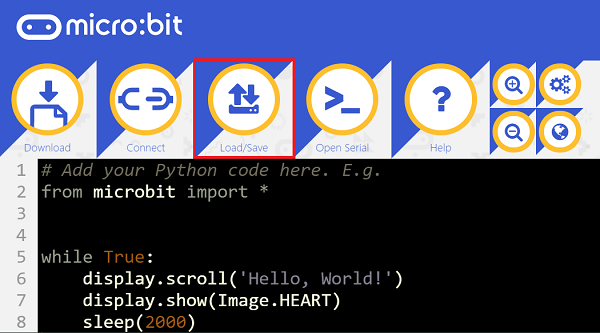
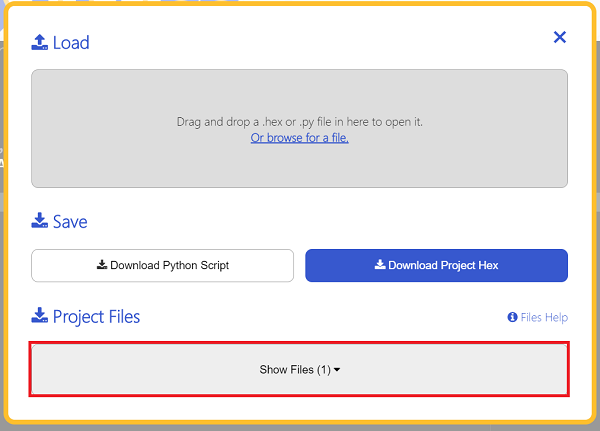
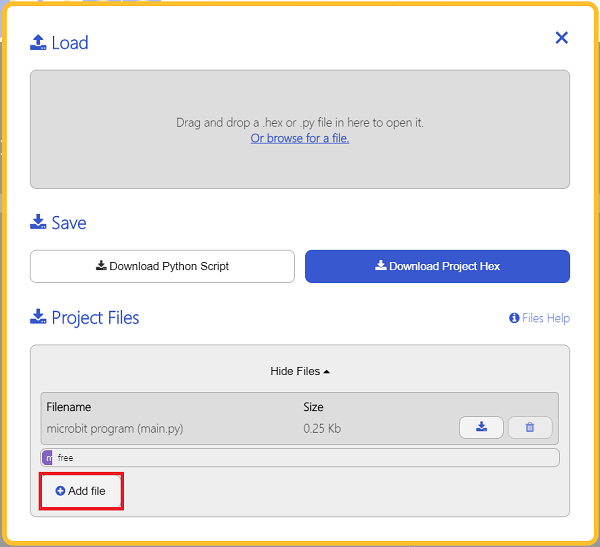
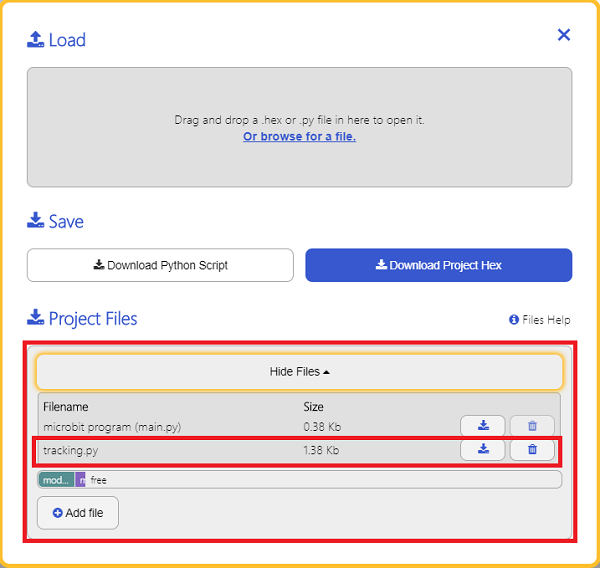
为了给双路巡线模块编程,我们需要添加tracking.py。点击Load/Save,然后点击Show Files(1)下拉菜单,再点击Add file在本地找到下载并解压完成的Octopus_MicroPython-master文件夹,从中选择tracking.py添加进来。
步骤 2#
参考程序#
from microbit import *
from tracking import *
trc = TRACKING(pin1,pin2)
while True:
if trc.get_state() == 11:
display.show(Image.HAPPY)
elif trc.get_state() == 00:
display.show(Image.SAD)
结果#
双路巡线传感器两个巡线头都检测到白色时显示哭脸,都检测到黑色时显示笑脸。