Cutebot智能赛车python使用示例
Contents
3. Cutebot智能赛车python使用示例#
3.1. 添加python文件#
下载压缩包并解压EF_Produce_MicroPython-master 打开Python editor
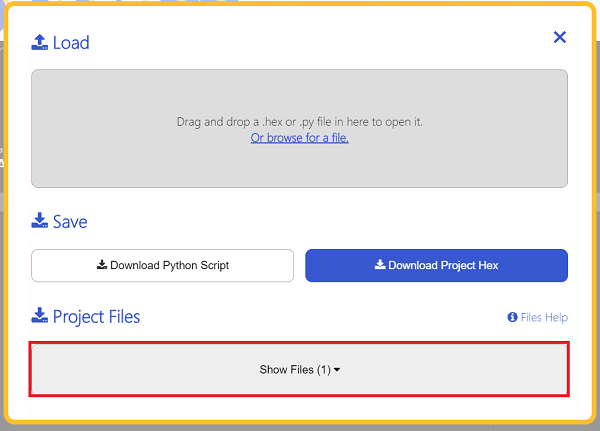
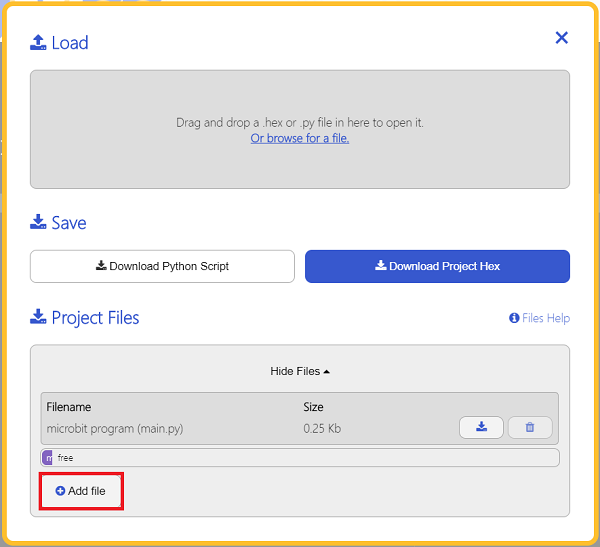
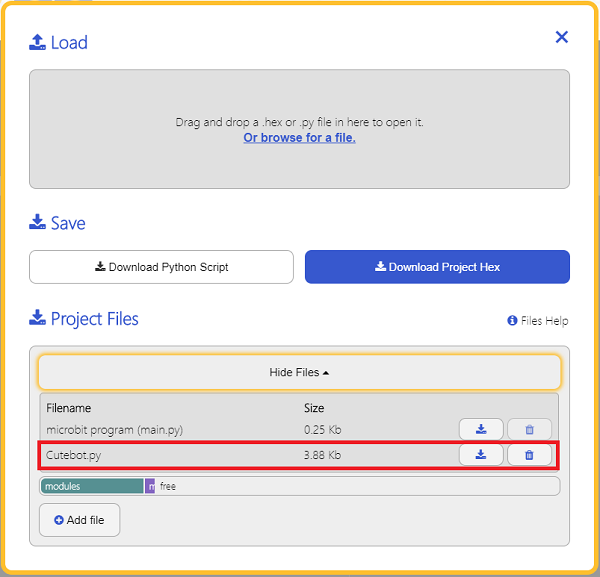
为了给酷比特智能赛车编程,我们需要添加Cutebot.py这个文件。点击Load/Save,然后点击Show Files(1)下拉菜单,再点击Add file在本地找到下载并解压完成的EF_Produce_MicroPython-master文件夹,从中选择Cutebot.py这个文件添加进来。
3.2. API#
CUTEBOT(object)
创建对象。
set_motors_speed(self, left_wheel_speed: int, right_wheel_speed: int)
设置左右轮的电机速度:
`left_wheel_speed: int`左轮速度-100~100
`right_wheel_speed: int`右轮速度-100~100。
set_car_light(self, light: int, R: int, G: int, B: int)
设置车头灯颜色:
`light`:选择车灯
`R`:R通道颜色0-255`
`G`:G通道颜色0-255`
`B`:B通道颜色0-255`
get_distance(self, unit: int = 0)
车头超声波读取距离:
`unit`检测距离单位:` 0 `厘米,` 1 `英尺
get_tracking(self)
返回当前巡线头状态:
return:`00` 均在白色
`10` 左黑右白
`01` 左白右黑
`11` 均在黑色
set_servo(self, servo, angle)
选择伺服电机并且设置角度/速度:
`servo (number)`选择第几个舵机(伺服电机)1,2
`angle (number)`设置舵机角度 0~180
示例代码#
示例一 让小车全速前进#
from microbit import *
from Cutebot import *
ct = CUTEBOT()
ct.set_motors_speed(100, 100)
结果#
酷比特小车左轮速度为100,右轮速度为100,全速前进。
示例二 点亮车头LED灯#
from microbit import *
from Cutebot import *
ct = CUTEBOT()
ct.set_car_light(left, 0, 90, 90)
ct.set_car_light(right, 200, 200, 0)
#设置左边车头灯为R:0,G:90,B:90;设置右边车头灯为R:200,G:200,B:0
结果#
酷比特小车两个车头灯分别亮不同的颜色。
示例三 超声波避障小车#
from microbit import *
from Cutebot import *
dis = CUTEBOT()
while(True):
i = dis.get_distance(0)
if i>3 and i<20:
dis.set_motors_speed(-50, 50)
sleep(500)
else:
dis.set_motors_speed(50, 50)
结果#
酷比特小车在行驶过程中如果遇到障碍物,则立即转向。
示例四 巡线行驶#
from microbit import *
from Cutebot import *
dis = CUTEBOT()
while(True):
i = dis.get_tracking()
if i == 10:
dis.set_motors_speed(10, 50)
if i == 1:
dis.set_motors_speed(50, 10)
if i == 11:
dis.set_motors_speed(25, 25)
结果#
酷比特小车巡线行驶。
示例五 控制舵机#
from microbit import *
from Cutebot import *
dis = CUTEBOT()
while(True):
dis.set_servo(0,180)
sleep(1000)
dis.set_servo(0,0)
sleep(1000)
结果#
酷比特小车S1端口连接的舵机往复转动。
3.3. FAQ#
关于程序报错信息:
| ValueError | 错误内容 |
|---|---|
| speed error,-100~100 | 小车的左轮或者右轮的速度超出设定阈值 |
| RGB is error | 小车的车头灯颜色参数超出设定阈值 |
| select servo error,1,2 | 小车的舵机接口参数设置错误 |
| angle error,0~180 | 舵机旋转角度设置错误 |