课程_37 隐形机器人
Contents
37. 课程_37 隐形机器人#
做一个隐形机器人在切换,触摸或监测到运动,抬起或被碰触时发出尖叫声,本教程由新加坡科技与设计大学的Shaun Toh在2018年暑期实习期间撰写。
37.1. 目标#
1.组装一个害羞的隐形机器人
2.输入代码来制作一个害羞的机器人
37.2. 物料#
1 x Micro:bit
电池
任何盒子(大到足以适合Micro:bit)
PIR传感器
电位器
被动蜂鸣器
2 x 跳线
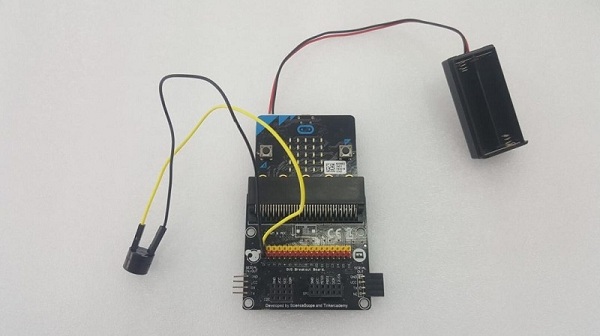
第一步-连接Micro:bit#
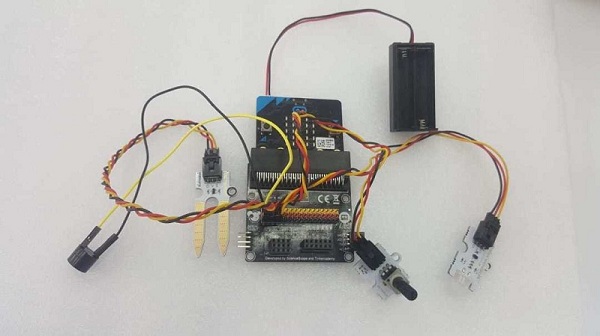
如图所示,将蜂鸣器连接到引脚0。蜂鸣器上的+号与断路器板上的黄色端口相连。
将土壤湿度传感器连接到针脚1。
将PIR传感器连接到引脚2。
将电位计连接到引脚3。
第2步 - 添加Tinker Kit包#
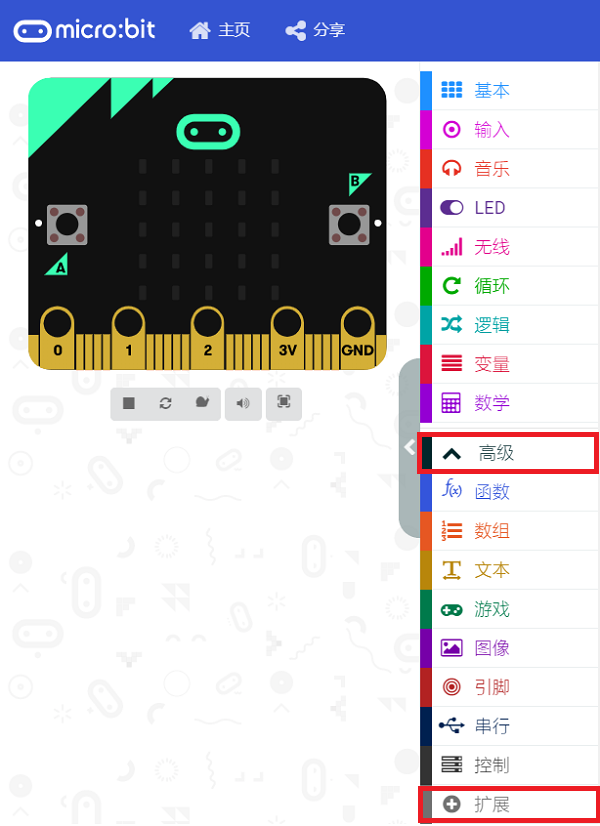
我们需要在代码编辑器中添加扩展库,以便能够使用套件组件。单击micro:bit文本编辑器中的高级,然后点击扩展。
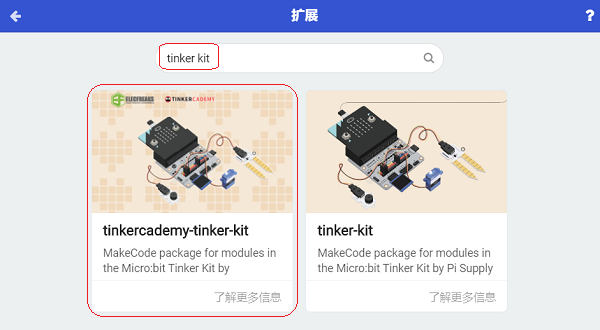
这将打开一个对话框。搜索Tinker kit套件。单击搜索图标或按Enter键,然后选择tinkercademy-tinker-kit。
这将增加两个库: Tinkercademy,用于我们套件中的通用传感器, OLED用于OLED模块(我们的高度为64,宽度为128)。 我们在本教程中没有使用OLED模块,但您可以!
步骤3 - 开始编码!#
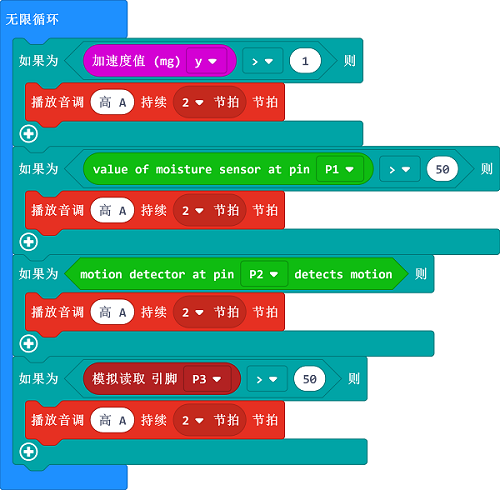
写入Micro:bit代码 - 编码隐形的机器人 您的程序包含一些“if”语句。我们希望机器人只对四种情况做出反应。
第一个条件是机器人被拾起。
第二个条件是有人触摸土壤湿度传感器
第三个条件是机器人检测到它前面的运动,并且
最后一个条件是有人切换电位器。
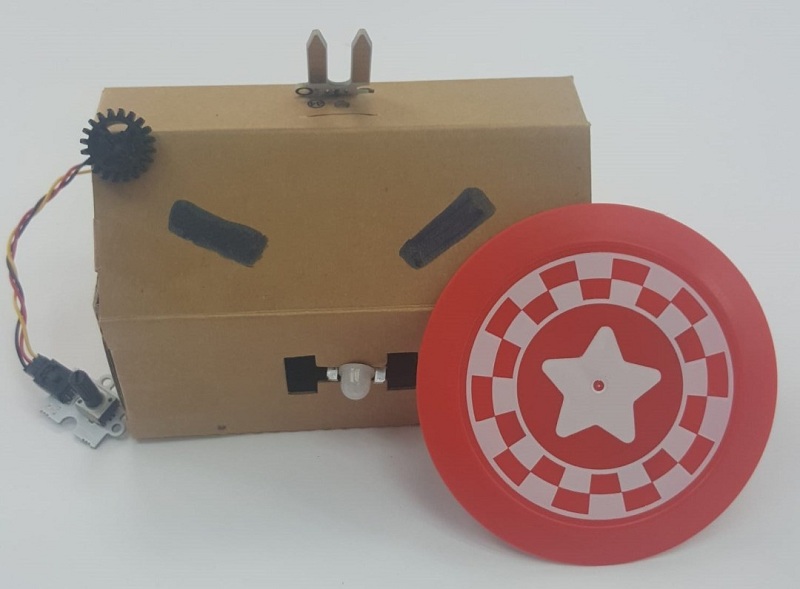
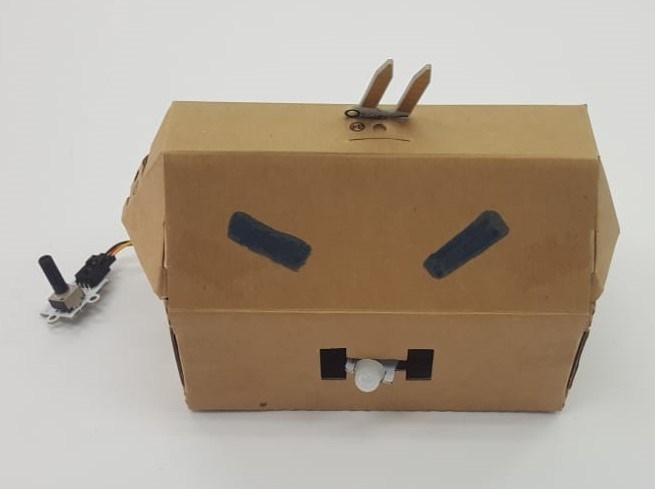
37.3. 你完成了!#
你已经完成了构建隐藏机器人所需的所有组件,只要有人惊吓,它就会发出声音!将它放入任何大到足以容纳组件的盒子中,同时让它们中的一些伸出来,并且你有自己的隐形机器人!随意打扮,但要小心,否则它会惊讶地开始尖叫!