AI摄像头:小球追踪
Contents
19.4. AI摄像头:小球追踪#
目的#
使用cutebot智能赛车搭配AI摄像头实现小球追踪功能。
使用材料#
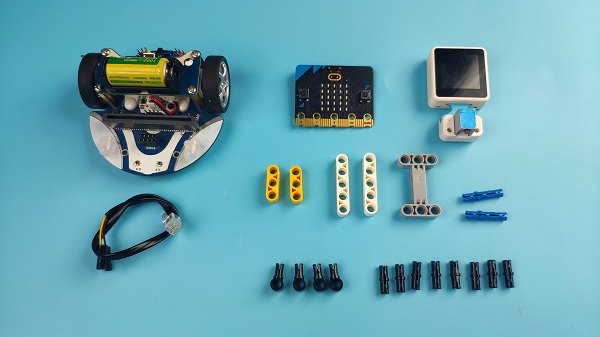
1 × Cutebot V3.0
1 × Cutebot套件锂电池扩展包
1 × AI摄像头
注意:AI摄像头适用于 Cute bot V 3.0只有(可以看到底板上打印的版本号)。
安装方式#
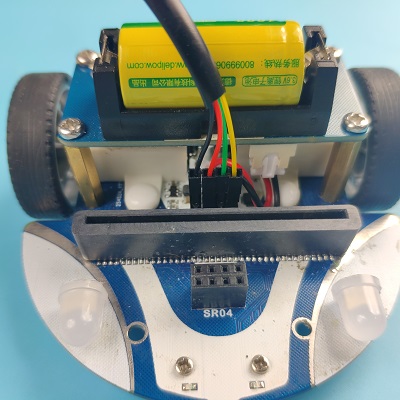
锂电池安装步骤:#

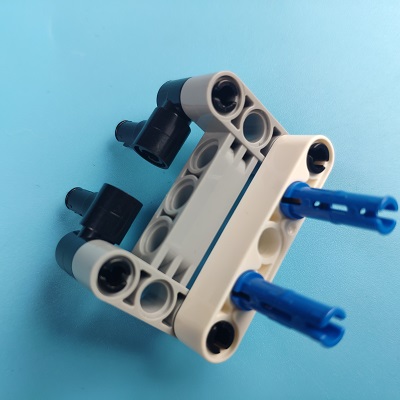
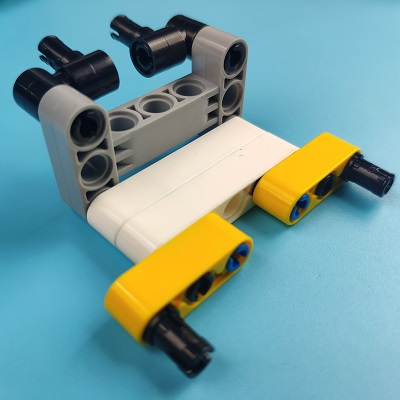
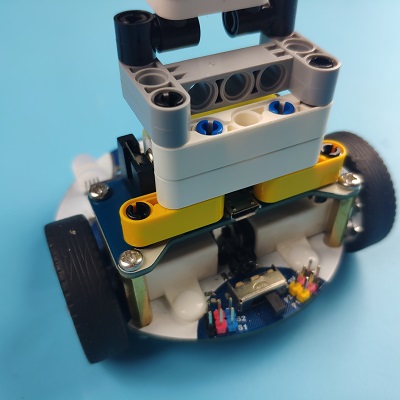
积木支架结构搭建步骤:#
零件清单:
搭建步骤:




AI摄像头连线方式:#
将连接线的RJ11接口的一端连接到AI摄像头,另一端杜邦线接口的一端连接到下图所示的位置,需要注意连接线的接口是否正确。
注意:这个积木支架结构是可以活动的,我们可以手动调节AI摄像头的视角,在使用AI摄像头时,应该根据功能需求来调节角度。
软件平台#
编程#
步骤 1#
在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
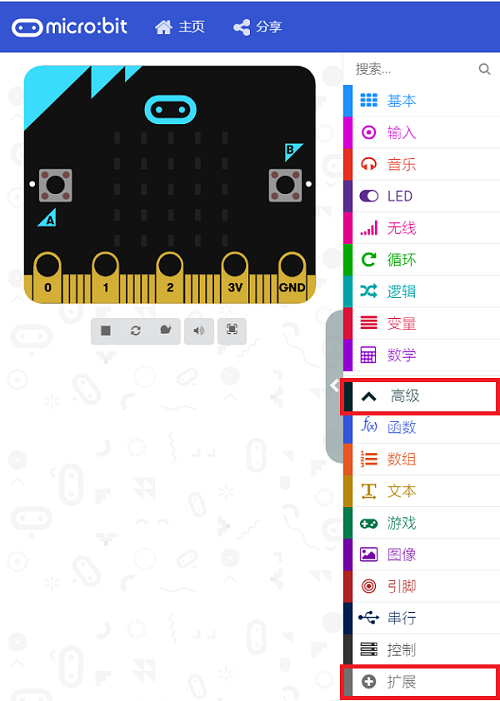
为了给Cutebot套件编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索
Cutebot,然后点击下载这个代码库。
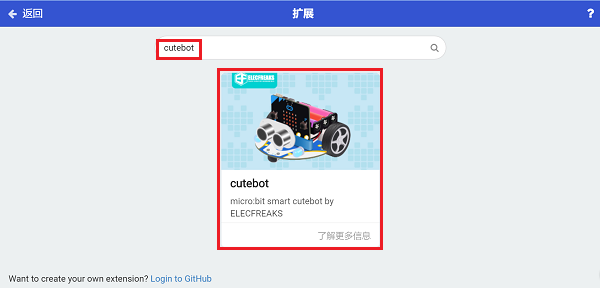
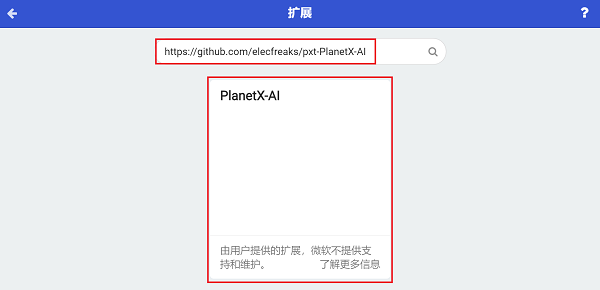
为了给AI摄像头编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索 https://github.com/elecfreaks/pxt-PlanetX-AI,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
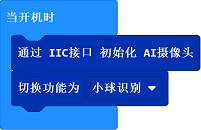
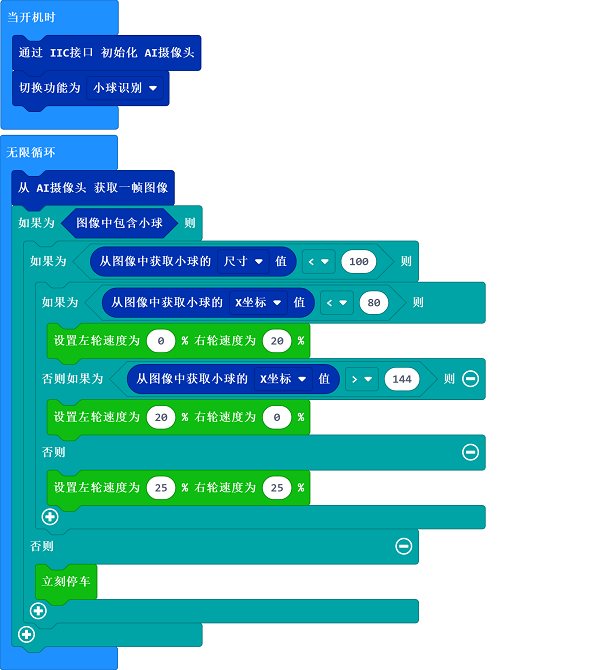
在
当开机时中,初始化AI摄像头,切换摄像头功能为小球识别模式。
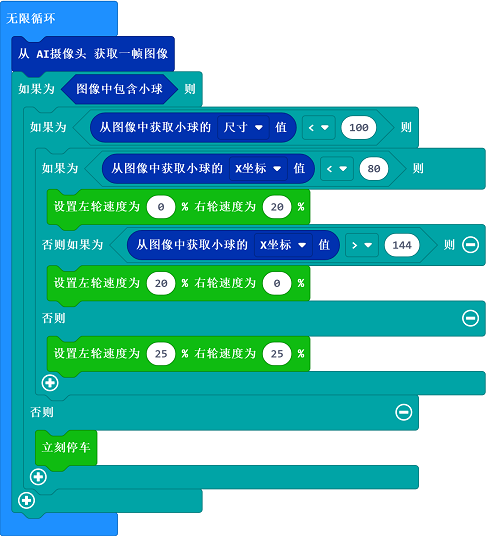
在
无限循环中,从摄像头获取一帧图像的信息,如果图像中包含小球,则判断小球的尺寸,当小球尺寸小于100时,说明小球离cutebot较远,此时通过从图像中获取小球的X坐标值来判断小球位置,如果X坐标值小于80时,说明小球在cutebot的左前方,设置cutebot左轮速度为0%,右轮速度为20%,小车左转,否则如果X坐标值大于144时,说明小球在cutebot的右前方,设置cutebot左轮速度为20%,右轮速度为0%,小车右转,否则设置cutebot左右轮速度为25%;当小球尺寸不小于100时,则说明小球离cutebot比较近,设置cutebot停止行驶。
程序#
请参考程序连接:https://makecode.microbit.org/_FWL7247fyfCk
你也可以通过以下网页直接下载程序。
---结论#
当摄像头识别到小球时,cutebot向小球行驶,当cutebot离小球的距离足够近时,cutebot停止行驶。