mBot扩展板(Robit)
Contents
2. mBot扩展板(Robit)#
2.1. 简介#
Robit是一款基于micro:bit的智能小车主板,它能完全兼容mBot的车架与传感器,除了继承了mBot上简单方便的RJ25接线端口、电机接口和传感器之外,我们还扩展4路直流电机接口、2路步进电机接口(步进电机接口与直流电机接口复用),8路PWM信号输出接口,可以驱动舵机等PWM信号驱动的设备,板载10路G-5V-S数字信号OCTOPUS电子积木接口,4路G-5V-S模拟信号OCTOPUS电子积木接口。Robit除了可以实现所有mBot的基本功能,还能扩展更多的传感器、电机、舵机、步进电机等。
2.2. 特性#
完全兼容mBot的车架与传感器。
支持4路直流电机驱动,2路步进电机驱动。
8路PWM信号输出接口。
扩展出10路G-5V-S数字信号OCTOPUS电子积木接口。
扩展出4路G-5V-S模拟信号OCTOPUS电子积木接口。
集成蜂鸣器、光敏传感器、彩虹LED、红外发射、红外接收等常用功能。
2.3. 参数#
项目 | 参数 :-: | :-: 直流电源供电输入电压|DC 3.7-6V 锂电池供电输入电压|DC 3.7-4.2V USB充电电流|500mA 可扩展模拟IO口数量|4 可扩展的数字IO口数量|10 舵机接口数量|8 直流电机驱动|4路 步进电机驱动|2路 可编程LED灯珠数|2颗 无源蜂鸣器|支持 光敏传感器|支持 红外接收|支持 红外发射|支持 尺寸|90mm X 74mm 净重|46g
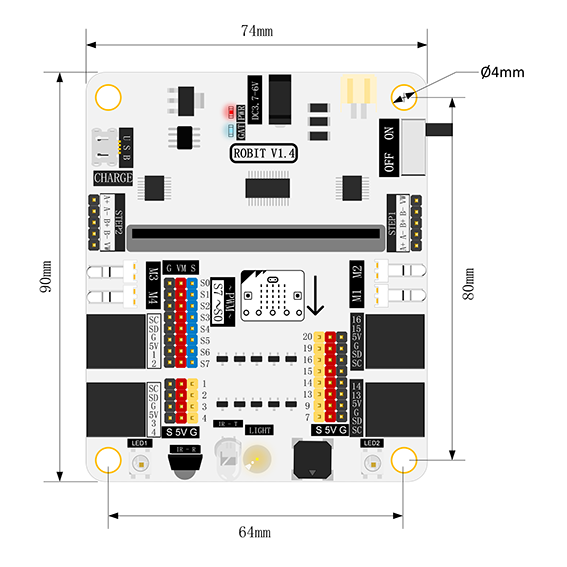
外形与安装定位尺寸#
2.4. 引脚接口框图#
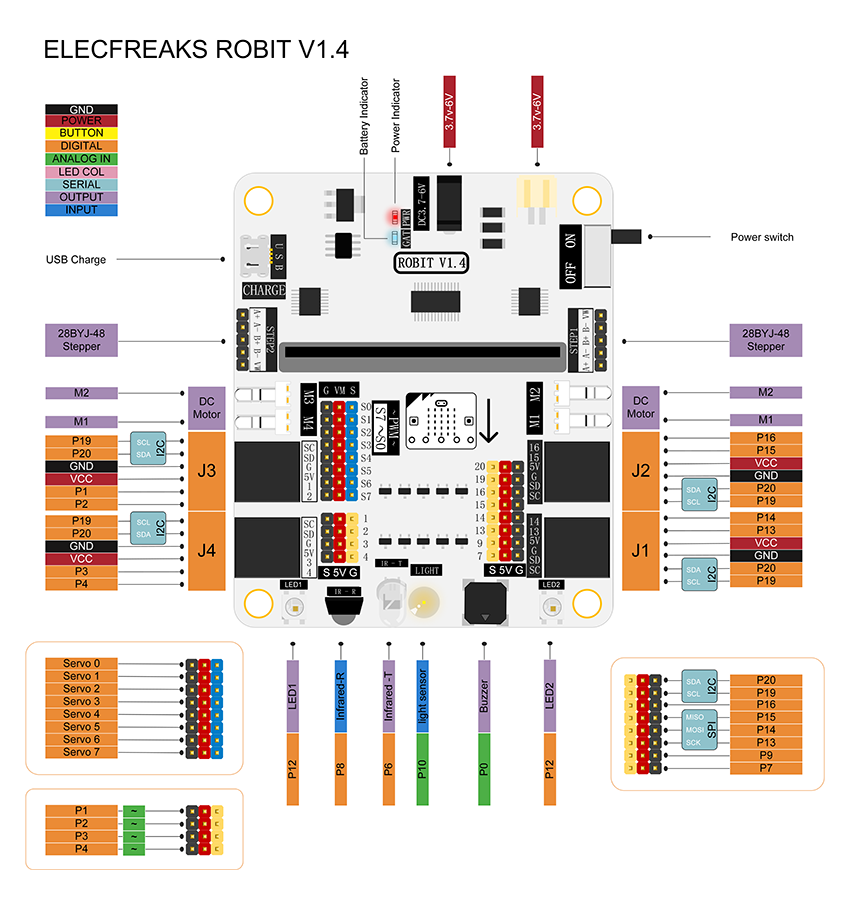
2.5. 主要功能模块介绍#
RJ25接口#
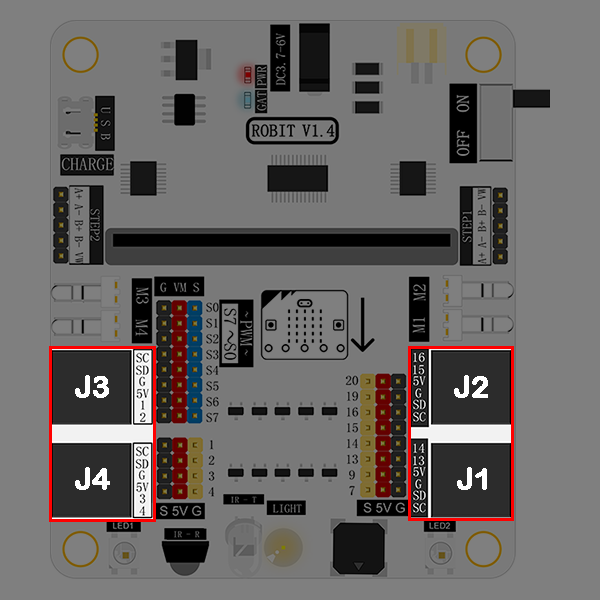
robit有4组RJ25接口,每个RJ25接口包含6个出点,分别对应了电源、两个IO口与IIC接口,兼容mBot部分传感器。
J1的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P13、P14。
J2的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P15、P16。
J3的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P1、P2,支持5V的模拟输入传感器。
J4的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P3、P4,支持5V的模拟输入传感器。
GVS标准电子积木接口#
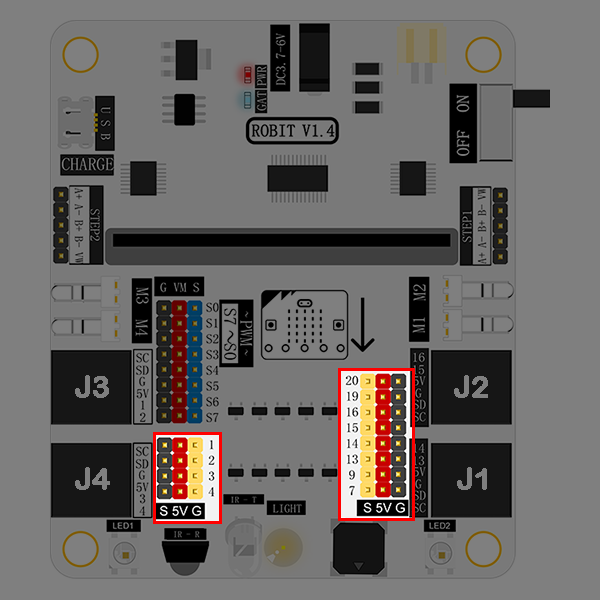
micro:bit的IO口除了引出至RJ25接口外,还以GVS的形式引出,支持5V的器件,其中P1、P2、P3、P4支持5V的模拟输入传感器。
GVS标准舵机接口#
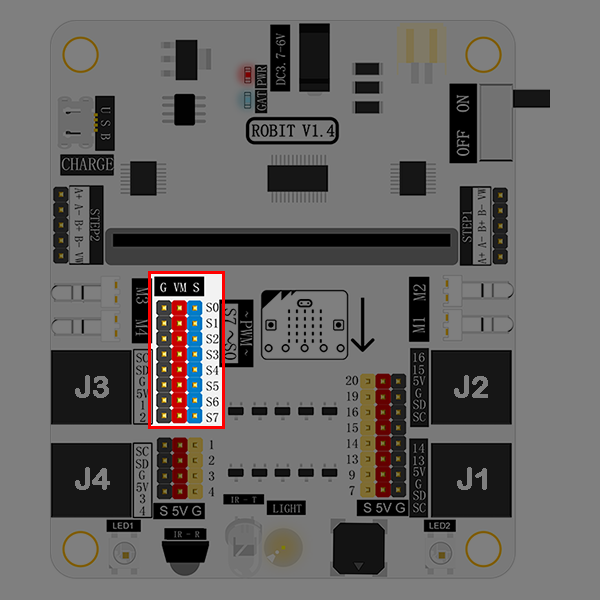
S0~S7,最多可同时接入8路舵机。该接口从PCA9685芯片引出,通过micro:bit的IIC接口扩展而来,不占用普通I/O口。
直流电机接口#

M1~M4,最多可同时接入4路直流电机。电机通过PCA9685芯片进行PWM控制,该芯片使用micro:bit的IIC接口,不占用普通I/O口。
步进电机接口#
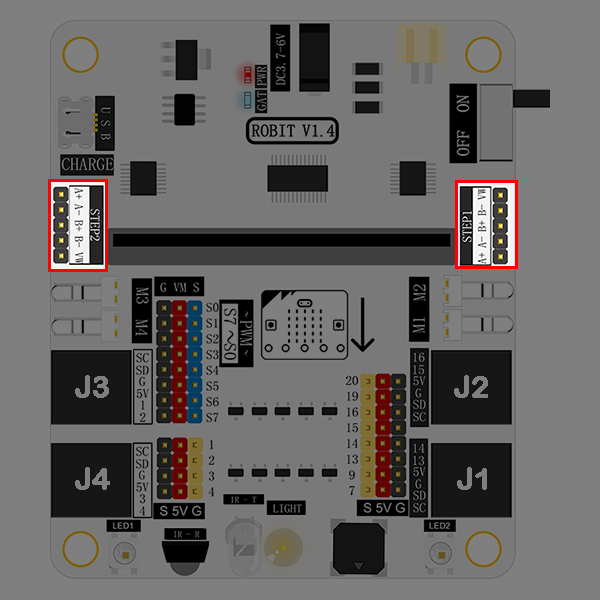
STEP1与STEP2,最多可同时接入两路28BYJ-48-5V步进电机。
蜂鸣器#
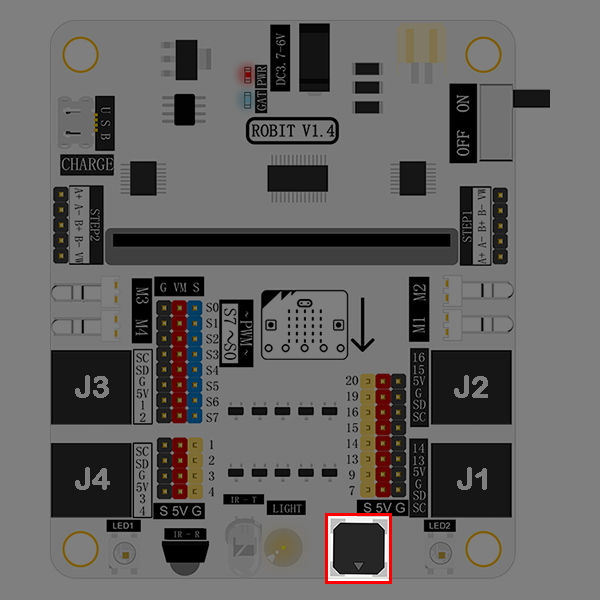
板载蜂鸣器,连接在micro:bit的P0口。
光线传感器#
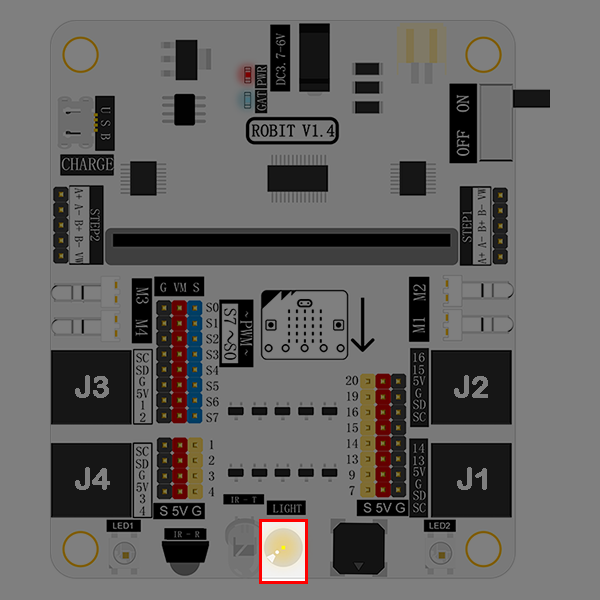
板载光线传感器,连接在micro:bit的P10口。
红外发射管#
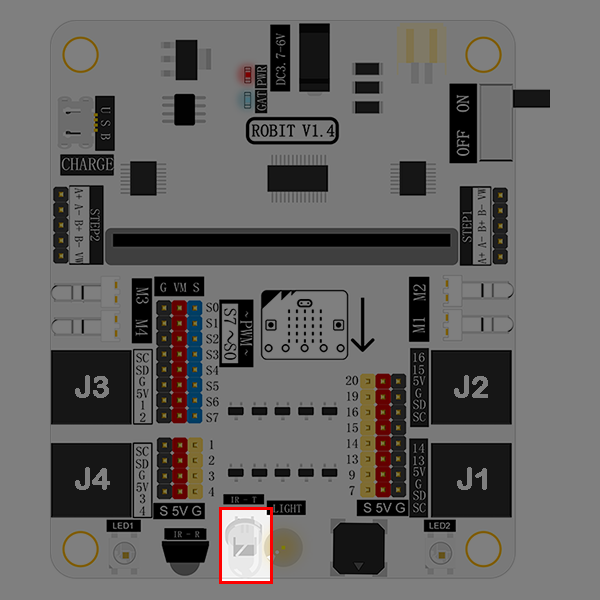
板载红外发射管,连接在micro:bit的P6口。
红外接收管#
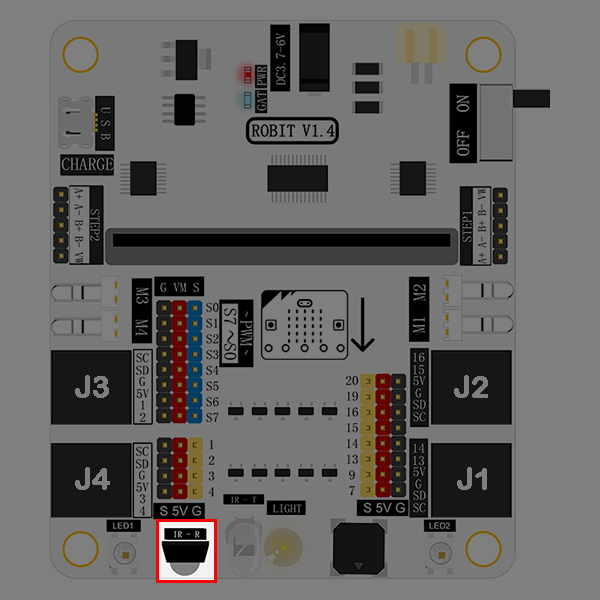
板载红外接收管,连接在micro:bit的P8口。
彩虹LED#
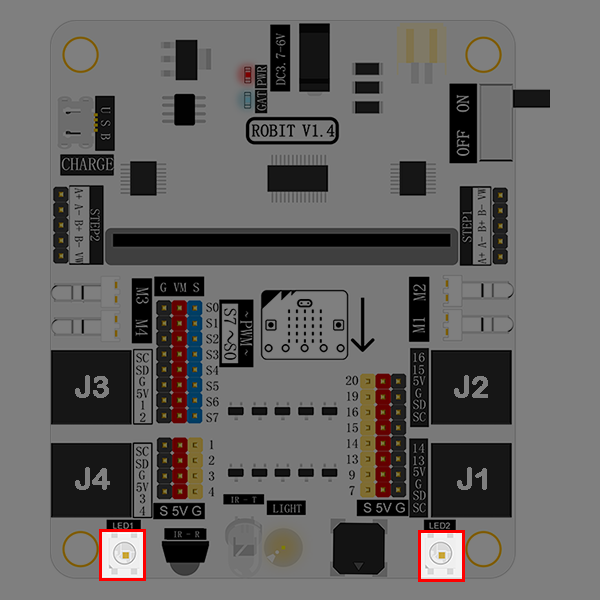
板载两颗彩虹LED,连接在micro:bit的P12。
DC电源接口#
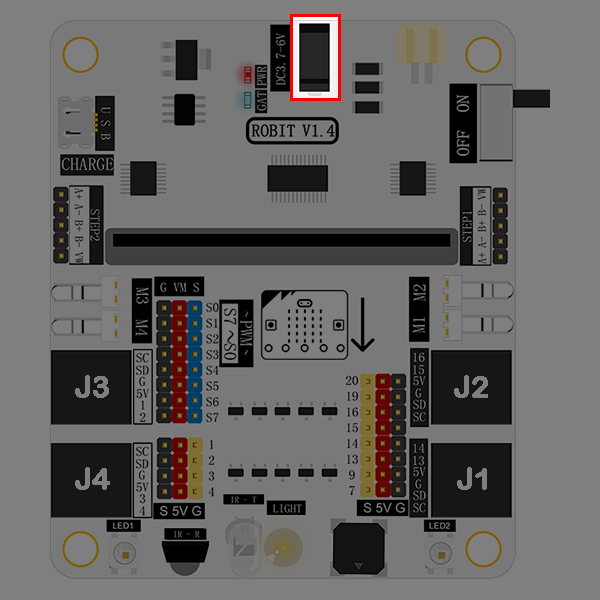
DC电源接口,可支持3.7V~4.2V直流电源,通常接入4节AAA电池盒。
锂电池接口#
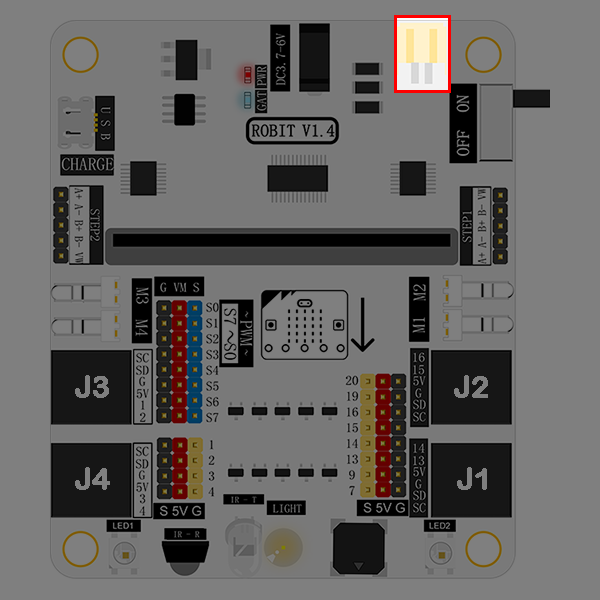
锂电池接口,可支持3.7V~4.2V锂电池。
锂电池电量指示灯#
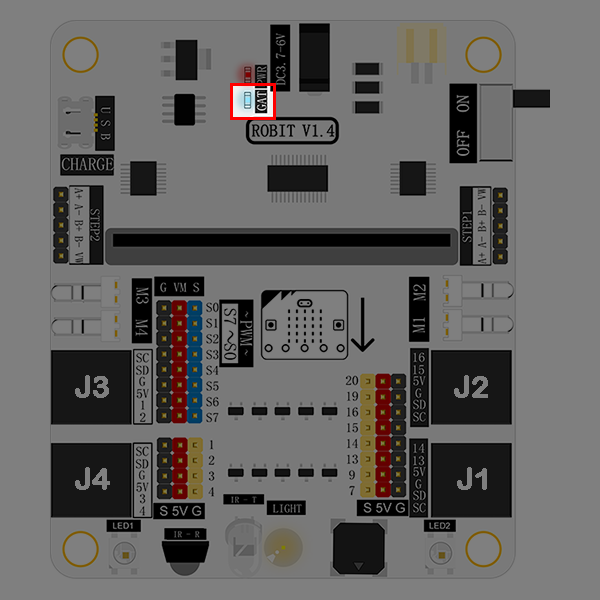
锂电池电量指示灯,为闪烁状态,满电为4格电,闪烁一次表示1格电,满电为连续闪烁4次。
USB充电接口#
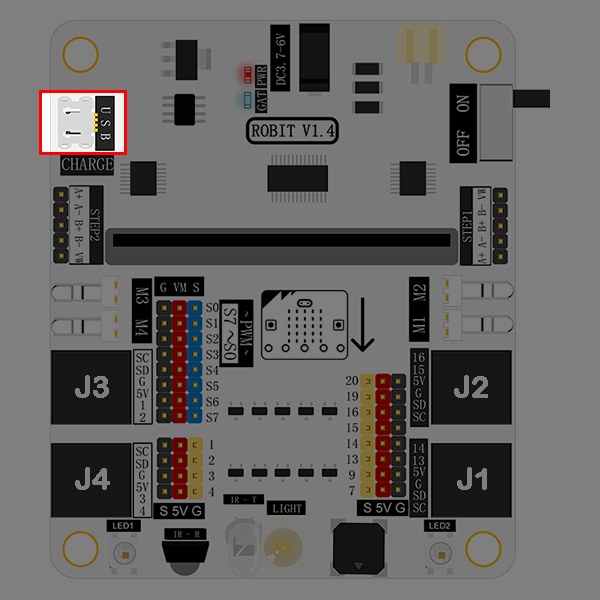
该USB接口仅用于为锂电池充电,不支持数据传输,充电电流为500mA。
2.6. 快速上手#
硬件连接#
将robit固定在mbot小车上;
将左轮电机接入M1口,将右轮电机接入M2口;
连接好后如图所示: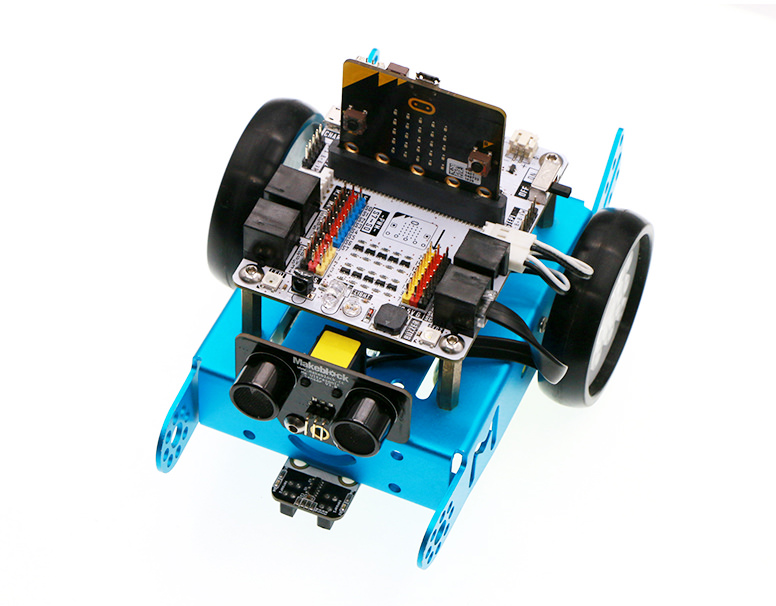
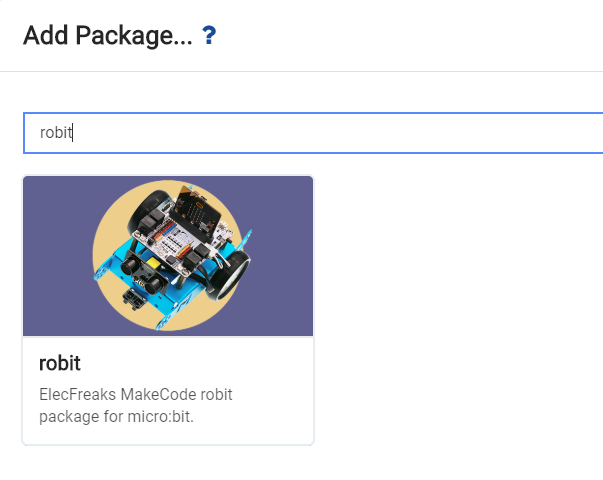
软件编程#
打开makecode,搜索关键词robit添加robit package。
编写程序,让robit小车先前进3秒,再后退3秒,往返运行,详细代码如下:
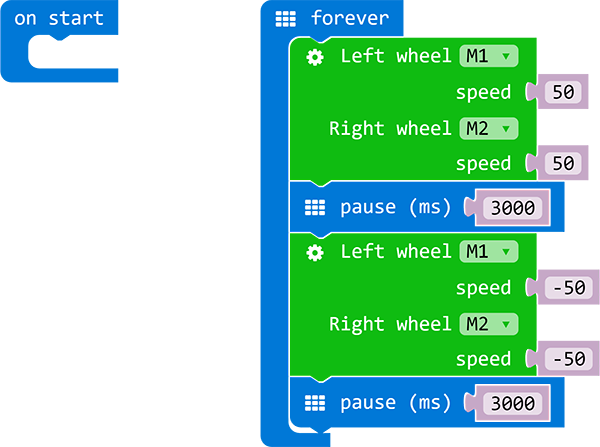
程序代码链接:https://makecode.microbit.org/_aXVAyx3dm585
你也能通过下列窗口直接下载代码:
结果#
robit小车先前进3秒,再后退3秒,往返运行。