Robit扩展板
Contents
8. Robit扩展板#
8.1. 简介#
Robit是一款基于micro:bit的智能小车主板,它能完全兼容mBot的车架与传感器,除了继承了mBot上简单方便的RJ25接线端口、电机接口和传感器之外,我们还扩展4路直流电机接口、2路步进电机接口(步进电机接口与直流电机接口复用),8路PWM信号输出接口,可以驱动舵机等PWM信号驱动的设备,板载10路G-5V-S数字信号OCTOPUS电子积木接口,4路G-5V-S模拟信号OCTOPUS电子积木接口。Robit除了可以实现所有mBot的基本功能,还能扩展更多的传感器、电机、舵机、步进电机等。
8.2. 特性#
完全兼容mBot的车架与传感器。
支持4路直流电机驱动,2路步进电机驱动。
8路PWM信号输出接口。
扩展出10路G-5V-S数字信号OCTOPUS电子积木接口。
扩展出4路G-5V-S模拟信号OCTOPUS电子积木接口。
集成蜂鸣器、光敏传感器、彩虹LED、红外发射、红外接收等常用功能。
8.3. 参数#
直流电源供电输入电压:DC 3.7-6V
锂电池供电输入电压:DC 3.7-4.2V
USB充电电流:500mA
可扩展模拟IO口数量:4
可扩展的数字IO口数量:10
舵机接口数量:8
直流电机驱动:4路
步进电机驱动:2路
可编程LED灯珠数:2颗
无源蜂鸣器:支持
光敏传感器:支持
红外接收:支持
红外发射:支持
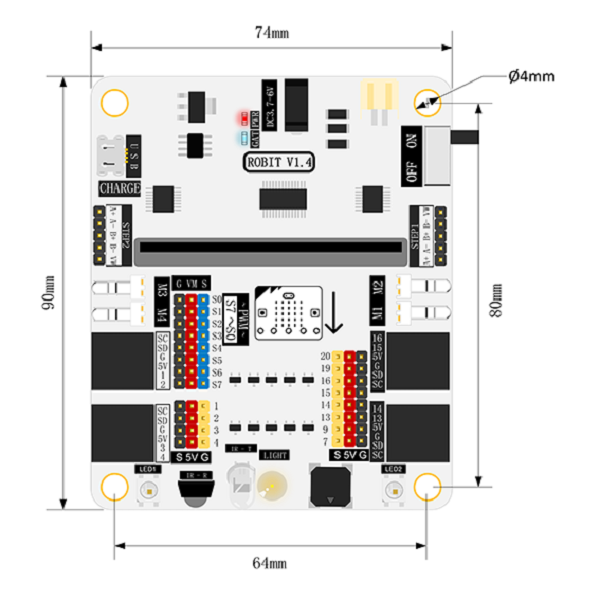
尺寸:90mm X 74mm
净重:46g
外形与安装定位尺寸#
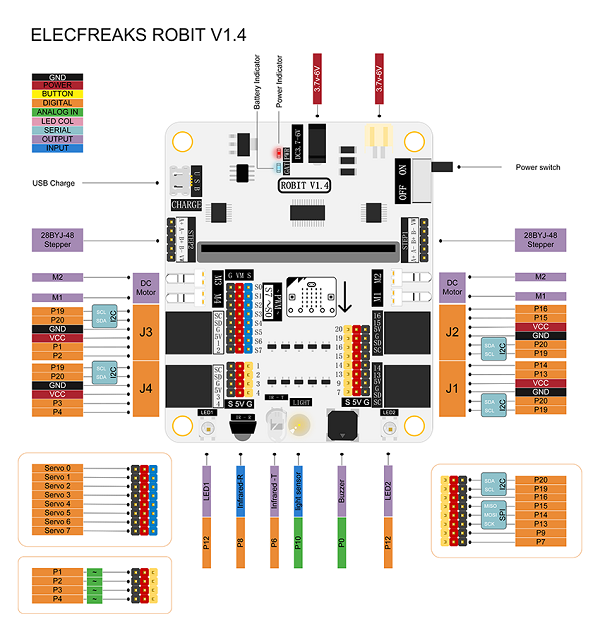
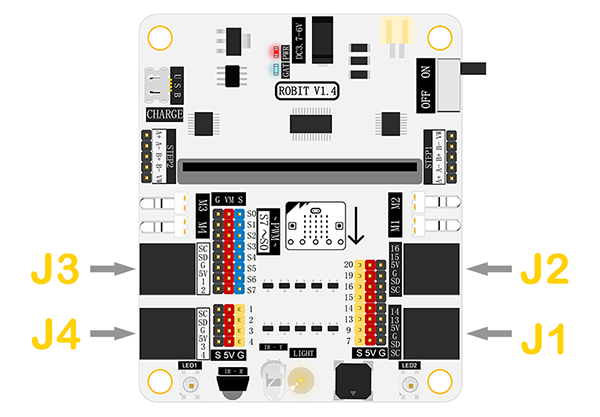
8.4. 引脚接口框图#
8.5. 主要功能模块介绍#
RJ25接口#
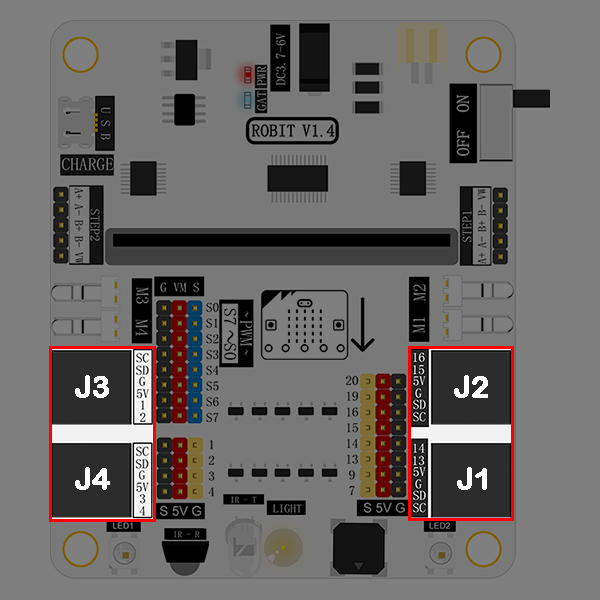
robit有4组RJ25接口,每个RJ25接口包含6个出点,分别对应了电源、两个IO口与IIC接口,兼容mBot部分传感器。
J1的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P13、P14。
J2的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P15、P16。
J3的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P1、P2,支持5V的模拟输入传感器。
J4的6个触点分别对应micro:bit的SCL(P19)、SDA(P20)、GND、5V、P3、P4,支持5V的模拟输入传感器。
GVS标准电子积木接口#
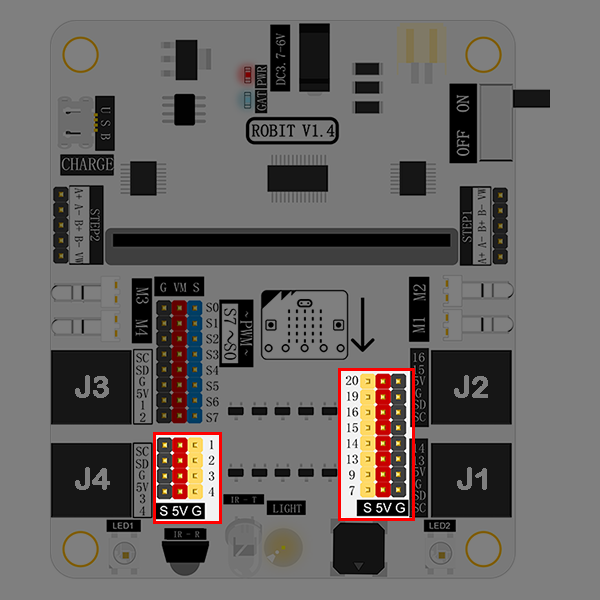
micro:bit的IO口除了引出至RJ25接口外,还以GVS的形式引出,支持5V的器件,其中P1、P2、P3、P4支持5V的模拟输入传感器。
GVS标准舵机接口#
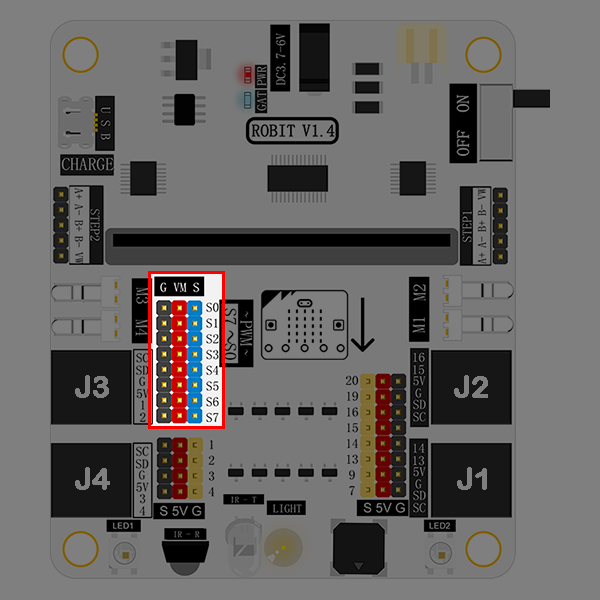
S0~S7,最多可同时接入8路舵机。该接口从PCA9685芯片引出,通过micro:bit的IIC接口扩展而来,不占用普通I/O口。
直流电机接口#
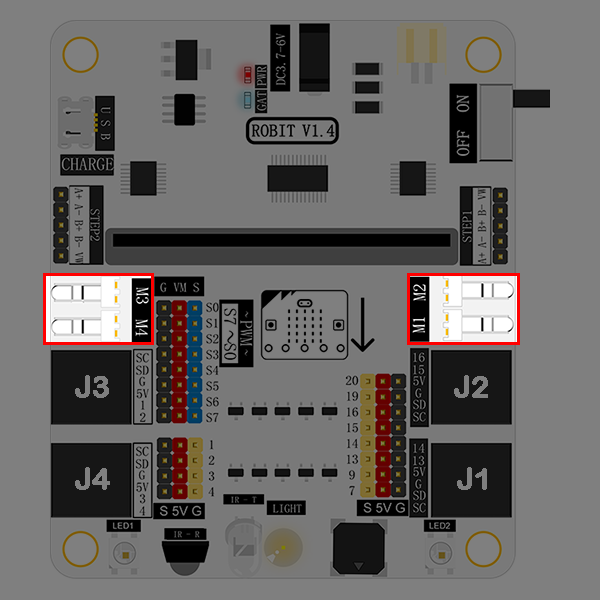
M1~M4,最多可同时接入4路直流电机。电机通过PCA9685芯片进行PWM控制,该芯片使用micro:bit的IIC接口,不占用普通I/O口。
步进电机接口#
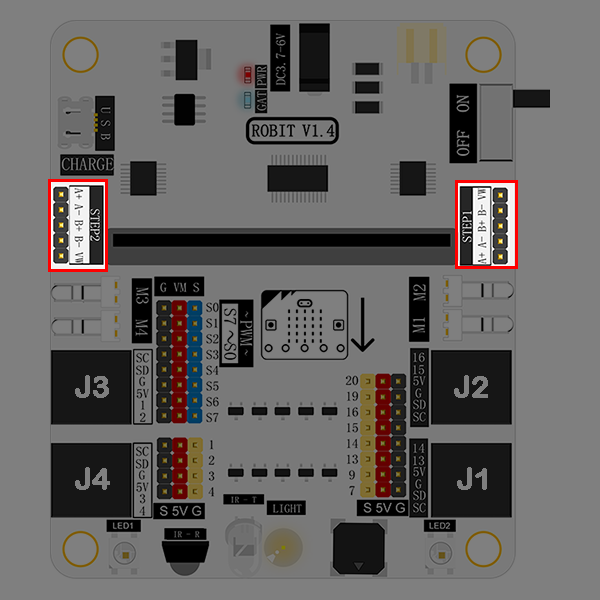
STEP1与STEP2,最多可同时接入两路28BYJ-48-5V步进电机。
蜂鸣器#
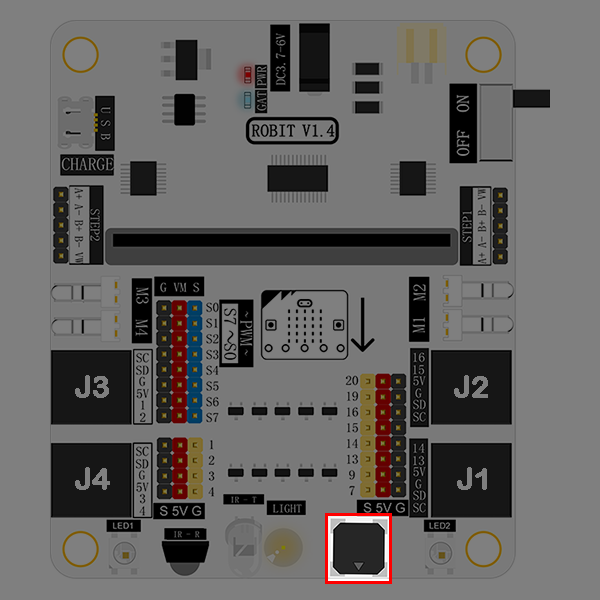
板载蜂鸣器,连接在micro:bit的P0口。
光线传感器#
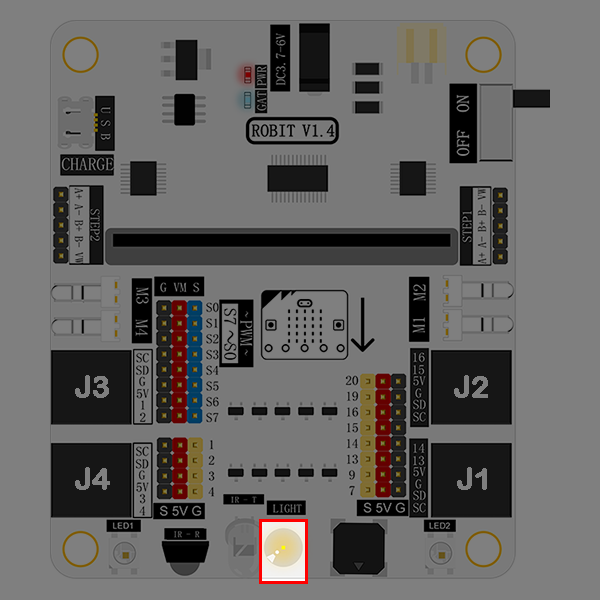
板载光线传感器,连接在micro:bit的P10口。
红外发射管#
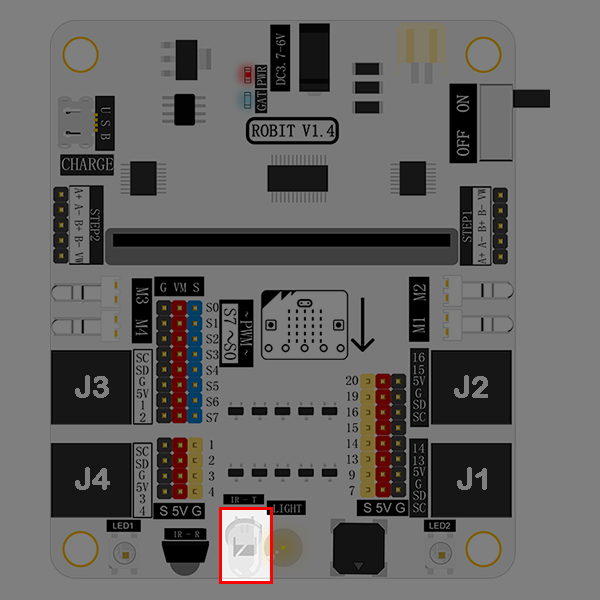
板载红外发射管,连接在micro:bit的P6口。
红外接收管#
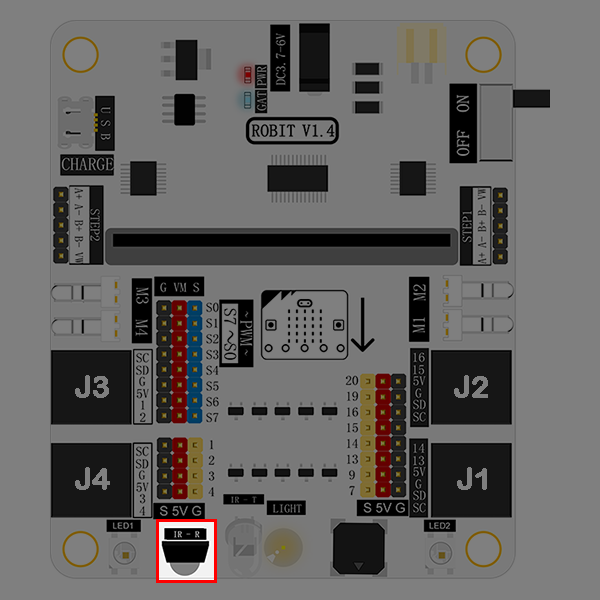
板载红外接收管,连接在micro:bit的P8口。
彩虹LED#
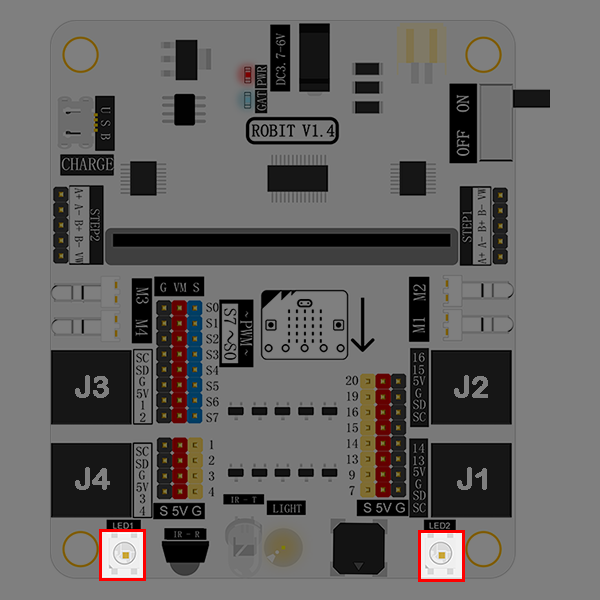
板载两颗彩虹LED,连接在micro:bit的P12。
DC电源接口#
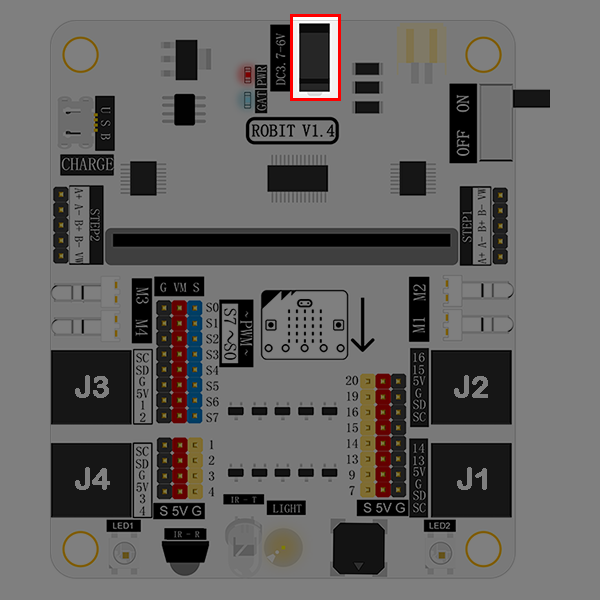
DC电源接口,可支持3.7V~4.2V直流电源,通常接入4节AAA电池盒。
锂电池接口#
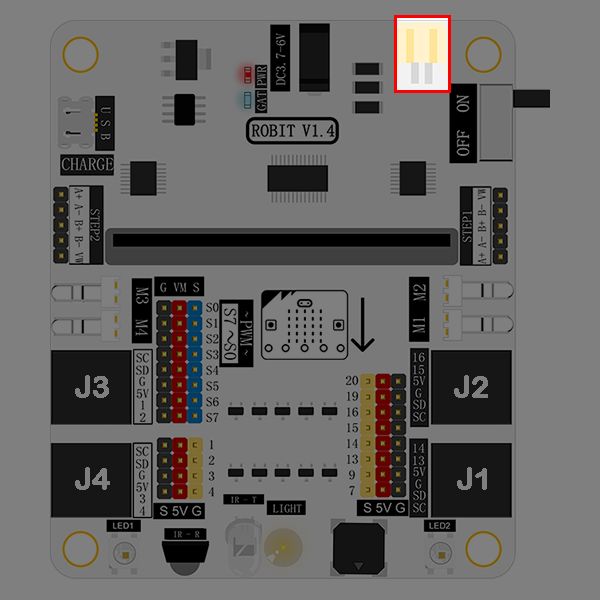
锂电池接口,可支持3.7V~4.2V锂电池。
锂电池电量指示灯#
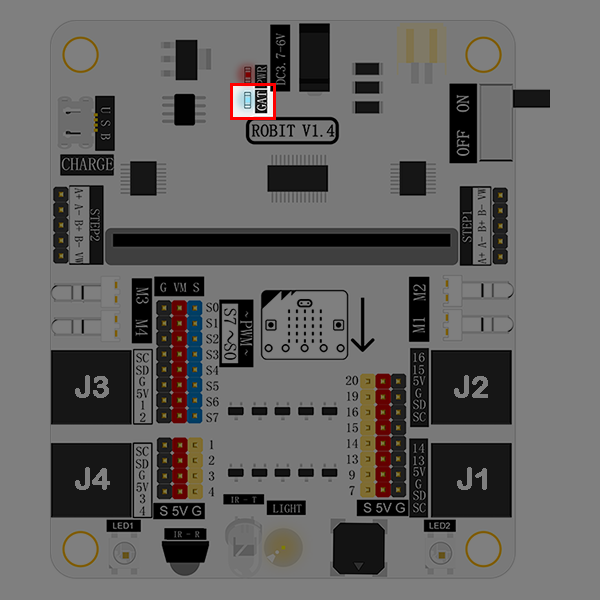
锂电池电量指示灯,为闪烁状态,满电为4格电,闪烁一次表示1格电,满电为连续闪烁4次。
USB充电接口#
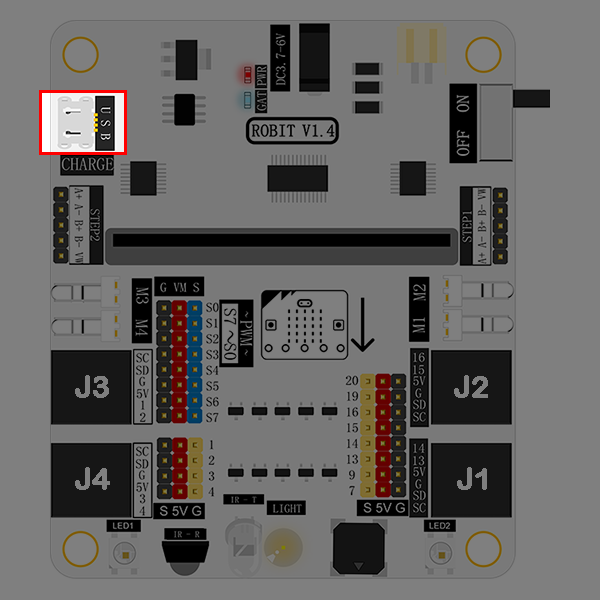
该USB接口仅用于为锂电池充电,不支持数据传输,充电电流为500mA。
8.6. 快速上手#
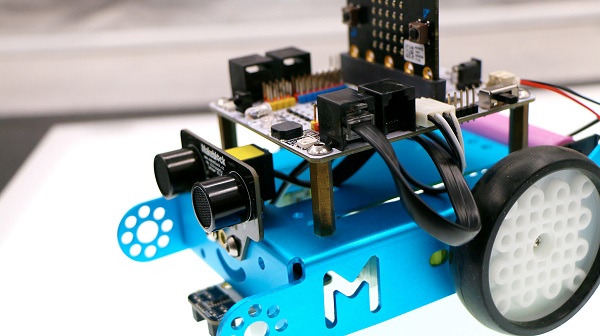
硬件连接#
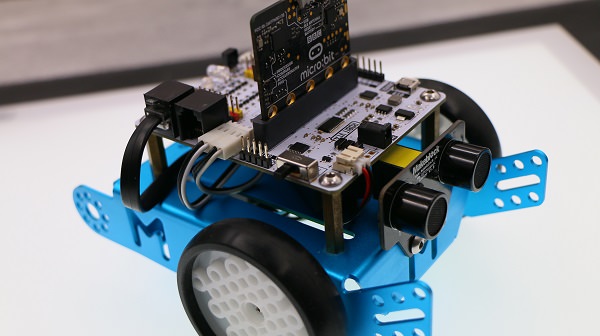
将robit固定在mbot小车上;
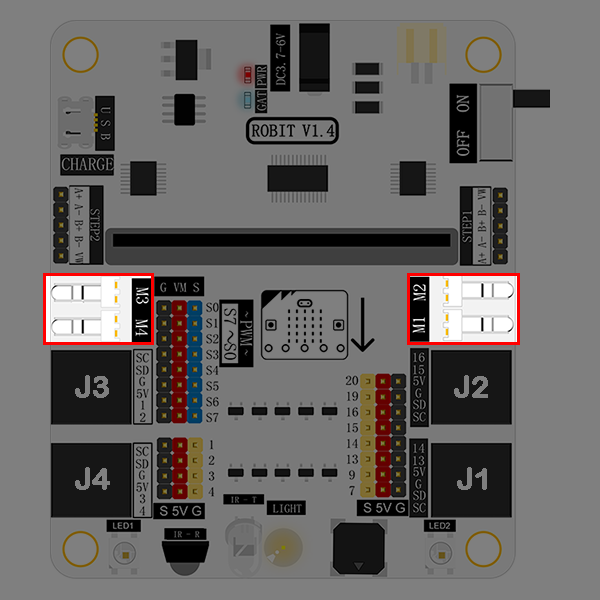
将左轮电机接入M1口,将右轮电机接入M2口;
连接好后如图所示: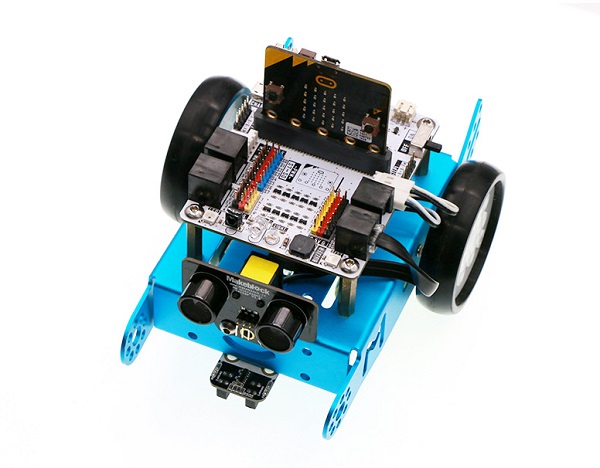
软件编程#
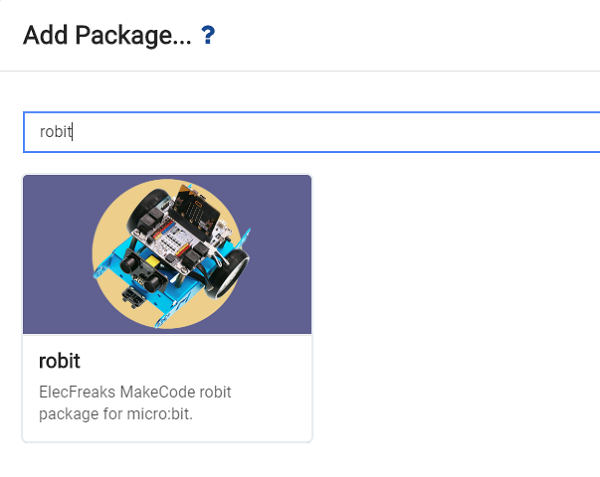
打开makecode,搜索关键词robit添加robit package。
编写程序,让robit小车先前进3秒,再后退3秒,往返运行,详细代码如下:

程序代码链接:https://makecode.microbit.org/_aXVAyx3dm585
你也能通过下列窗口直接下载代码:
结果#
robit小车先前进3秒,再后退3秒,往返运行。
8.7. 案例01 超声波测距#
目的#
了解什么是超声波,如何用超声波测距。
使用Robit主板控制的mBot迷你小车上的超声波模块来测距。
使用材料#
1 x Robit智能小车主板
1 x Mbot Car
背景知识#
什么是超声波#
超声波是一种频率高于20000赫兹的声波,它的方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等。超声波因其频率下限大于人的听觉上限而得名。
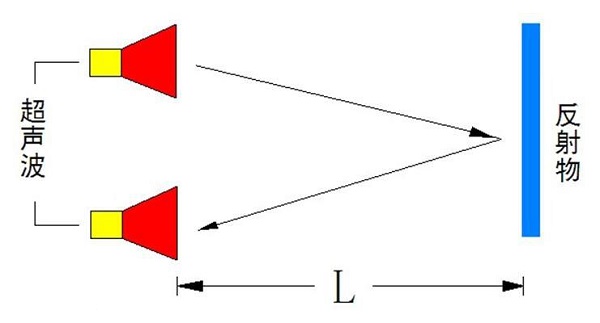
超声波测距原理#
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据接收器接到超声波时的时间计算距离,与雷达测距原理相似。
硬件连接图#
如图所示,将超声波模块与Robit主板J1口使用RJ25接线链接
软件#
编程#
步骤 1#
在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
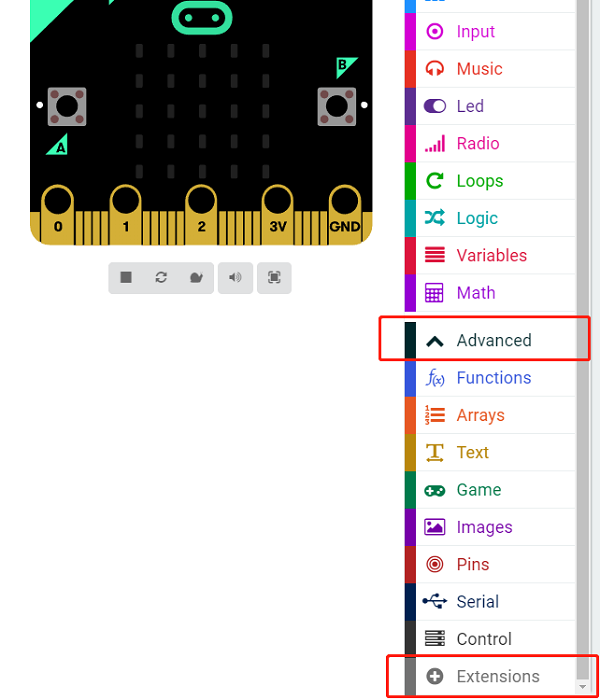
为了给超声波模块编程,我们需要添加一个代码库。在代码抽屉底部找到“Add Package”,并点击它。这时会弹出一个对话框。搜索Robit,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
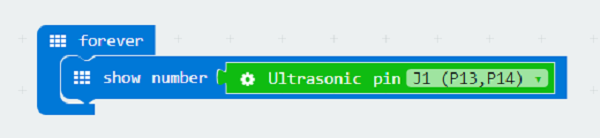
在Basic中拖出一个forever积木块,在其中插入show number积木块。
在Robit中拖出Ultrasonic pin积木块,选择J1(P13,P14)。这条语句作用为读取超声波模块返回参数。
程序#
请参考程序连接:https://makecode.microbit.org/_3ktFD2gabF7J
你也可以通过以下网页直接下载程序。
注意: 该超声波模块检测的最大距离大约为400cm。
现象#
超声波模块会实时返回距离,并且显示在Micro:bit的5X5点阵上,距离单位为厘米CM。
思考#
超声波测距显示距离为0有几种情况?
8.8. 案例02 超声波避障#
目的#
使用Robit主板控制mBot迷你小车实现避障功能。
使用材料#
1 x Robit智能小车主板
1 x Mbot Car
知识提要#
在上一节:超声波测距中我们实现了使用超声波模块实时检测距离,在本节教程中,我们使用超声波模块实现mBot迷你小车的避障功能。
硬件连接#
将左轮电机接入M1端口,右轮电机接入M2端口,超声波模块如上节教程一样接入J1端口。
软件#
编程#
步骤 1#
在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
为了给超声波模块编程,我们需要添加一个代码库。在代码抽屉底部找到“Add Package”,并点击它。这时会弹出一个对话框。搜索Robit,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
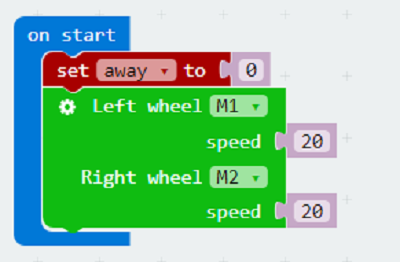
程序初始化时,定义了一个away变量,用来表示检测到障碍物的距离,并将它置为0。
设置左轮电机M1、右轮电机M2速度均为20。
步骤3#
创建一个forever循环,实时的从J1口读取超声波模块返回的数据,并且赋值给away。

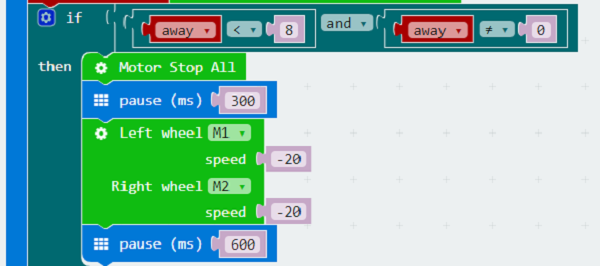
防撞停车#
当检测距离(away)距离小于8cm时,停车,暂停300ms后,设置M1,M2为负数实现倒车,延时600ms。
转向避障#
当检测距离(away)距离小于15cm时,生成一个0到100的随机数。
当随机数小于50的时候M1电机赋负值,左轮倒转完成左转。
当随机数大于50的时候M2电机赋负值,右轮倒转完成左转。
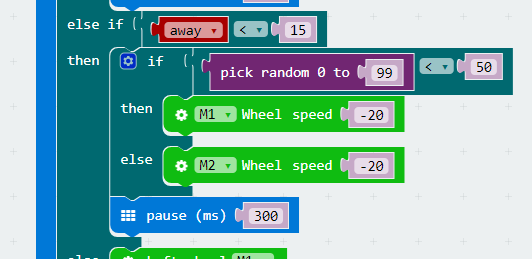
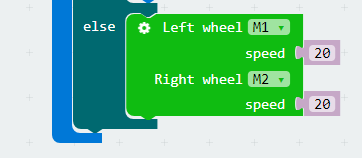
如果检测距离(away)大于10cm而且不等于0,设置M1和M2速度20前进。
参考程序#
参考程序连接:https://makecode.microbit.org/_X2g8PfeebXqv
你也可以通过下方网页直接下载程序。
注意: 设置速度过低时会造成电机运转不正常。
现象#
mBot小车在检测到障碍物距离还有20cm时自动转向,转向后如距离障碍物太近自动倒车。
思考#
为什么在防撞停车中要判断距离是否为0?
常见问题#
问:为什么开启5X5点阵屏后,会导致无法避障?
答:LED点阵显示会严重拖慢程序运行速度,导致小车检测障碍物不及时,要使程序流畅运行,建议禁用5x5显示屏。
8.9. 案例03 永不坠落的小车#
目的#
了解巡迹模块,认识巡迹模块。
使用Robit主板控制的mBot迷你小车上的巡迹模块实现边缘检测。
使用材料#
1 x Robit智能小车主板
1 x Mbot Car
背景知识#
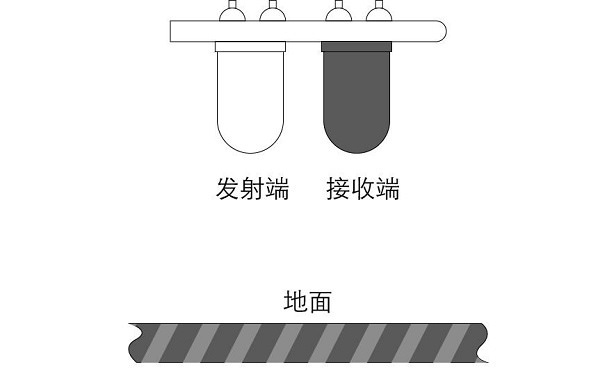
巡迹模块原理#
该巡迹模块使用的为红外线传感器,模块由一个发射端和一个接收端组成,发射端发射红外线由地面反射回来由接收端接收。
遇到黑色地面或者其他吸收红外光材质的物品时,接收端无法接收到红外线,巡迹模块返回1。
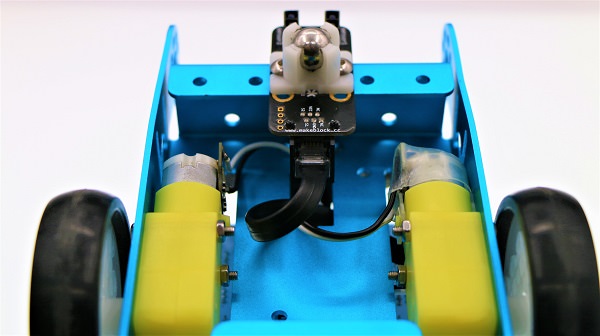
硬件连接图#
如上节所示将左右轮电机介入M1,M2端口。 如图所示,将巡迹与Robit主板J2口使用RJ25接线连接。
软件#
编程#
步骤 1#
在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
为了给超声波模块编程,我们需要添加一个代码库。在代码抽屉底部找到“Add Package”,并点击它。这时会弹出一个对话框。搜索Robit,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
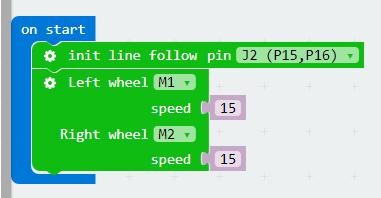
在开机启动时初始化巡迹模块端口为J2(P15,P16),设置左右轮电机到M1,M2端口速度为15。
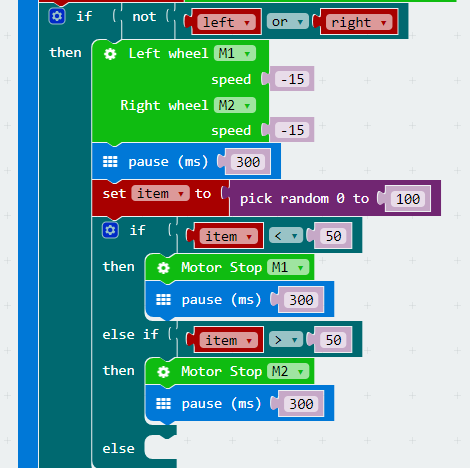
设置左右两个红外线传感器的返回值变量Left和right,读取左右红外线传感器的返回参数。

如果左右红外线中至少有一个没收到反馈(检测到边缘),设置左右电机速度为负数倒车。 随机生成一个0到100的数,如果小于50,停止电机M1完成右转向,如果大于50,停止电机M2完成左转向。
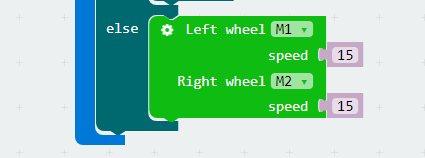
如果左右红外线传感器均未检测到,设置左右电机速度为15继续前进。
程序#
请参考程序连接:https://makecode.microbit.org/_1mCg9TgVxJ5K
你也可以通过以下网页直接下载程序。
注意: 可吸收红外光物体均视为黑线。
现象#
mBot小车会检测到桌面边缘后退防止掉落。
8.10. 案例04 巡线#
目的#
使用Robit主板控制的mBot迷你小车上的巡迹模块实现沿线跑圈。
使用材料#
1 x Robit智能小车主板
1 x Mbot Car
硬件连接图#
如上节所示将左右轮电机介入M1,M2端口。 如图所示,将巡迹与Robit主板J2口使用RJ25接线连接。
软件#
编程#
步骤 1#
在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
为了给超声波模块编程,我们需要添加一个代码库。在代码抽屉底部找到“Add Package”,并点击它。这时会弹出一个对话框。搜索Robit,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
在开机启动时初始化巡迹模块端口为J2(P15,P16),设置左右轮电机到M1,M2端口速度为15。
设置左右两个红外线传感器的返回值变量Left和right,读取左右红外线传感器的返回参数。

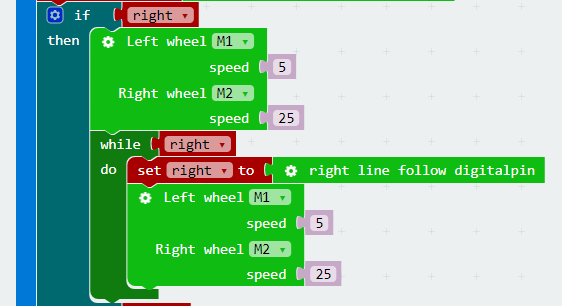
如果右侧红外线传感器检测到脱离黑线,设置左轮速度为5右轮速度为25,向左转。之后设置一个循环,检测小车是否回归到黑线,如果没有就继续向左转直到回到黑线。
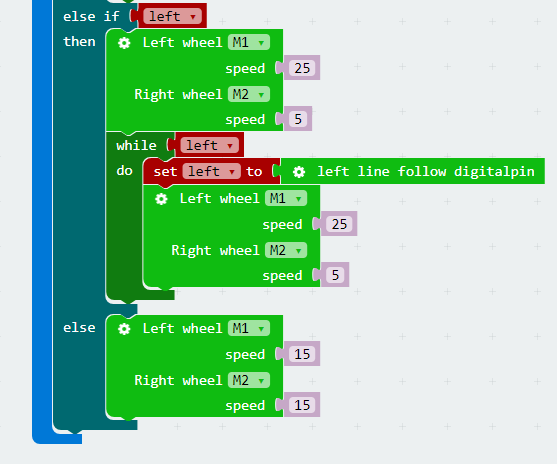
如果左侧红外线传感器检测到脱离黑线,同理向右转回归黑线。
程序#
请参考程序连接:https://makecode.microbit.org/_9WECsHJmpDxM
你也可以通过以下网页直接下载程序。
--- **注意:** 可吸收红外光物体均视为黑线。结论#
mBot小车会沿着预定画好的黑线前进。
8.11. 案例05 倒车报警#
目的#
使用Robit主板控制mBot迷你小车实现倒车报警功能。
使用材料#
1 x Robit智能小车主板
1 x Mbot Car
背景知识#
蜂鸣器#
蜂鸣器是一种发声器件,它由振动装置和谐振装置组成。按照控制方式分类,可把蜂鸣器又分为有源型与无源型。
有源型蜂鸣器的工作发声原理是:蜂鸣器内部集成振荡系统与放大取样电路,当有直流电源通过蜂鸣器时会使谐振装置产生声音信号,有源型蜂鸣器的工作发声原理图如下:
无源型蜂鸣器的工作发声原理是:方波信号输入谐振装置转换为声音信号输出,无源型蜂鸣器的工作发声原理图如下:
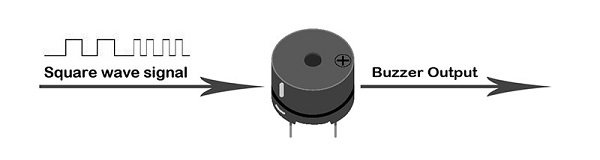
**注意:**本次实验,我们使用的是无源蜂鸣器。
教程目的#
在超声波避障中我们实现了使用超声波模块实时检测障碍物,在本节教程中,我们使用超声波模块和蜂鸣器模块实现mBot迷你小车带有声音提醒的倒车雷达功能。
硬件连接#
将左轮电机接入M1端口,右轮电机接入M2端口。
超声波模块接入J1端口,本案例我们需要实现倒车雷达的功能,所以需要把超声波模块安装在小车尾部。
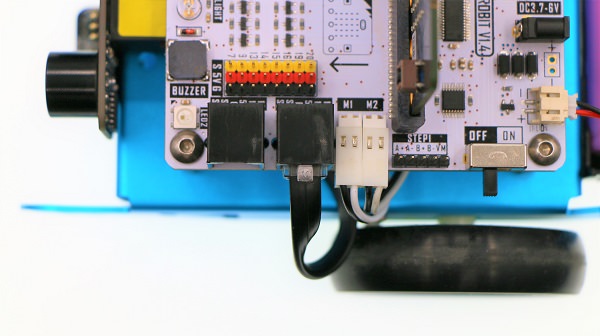
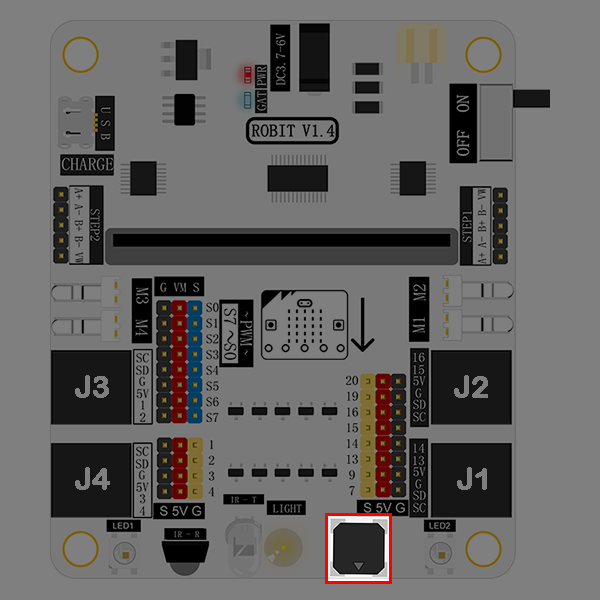
蜂鸣器所处位置如图所示,接入Micro:Bit的P0端口。
软件#
编程#
步骤 1#
在MakeCode的代码抽屉中点击Advanced,查看更多代码选项。
为了给超声波模块编程,我们需要添加一个代码库。在代码抽屉底部找到“Add Package”,并点击它。这时会弹出一个对话框。搜索Robit,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
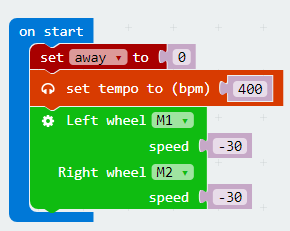
开机初始化设置距离变量为away,设置蜂鸣器频率为400Hz,设置左右轮电机分别为M1,M2端口速度为-30。
步骤3#
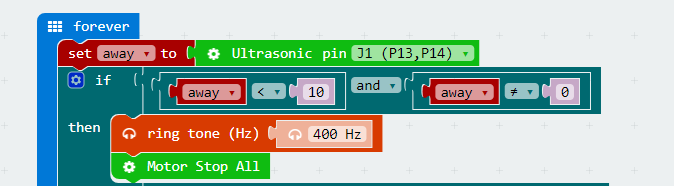
创建一个forever循环,接收超声波模块返回的数据存入away变量。
如果小车距离墙面是否小于10cm,蜂鸣器长鸣,同时两侧电机都停止。
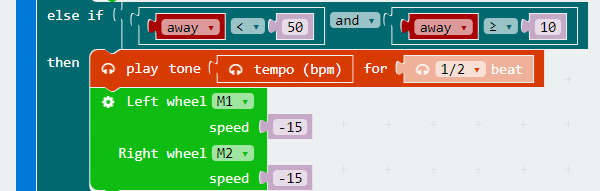
如果小车距离墙面大于10cm且小于50cm,蜂鸣器以1/2节拍蜂鸣,同时设置电机转速为-15。
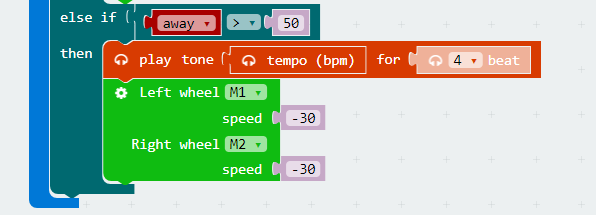
如果小车距离墙面大于50cm,蜂鸣器以4节拍蜂鸣,同时设置电机转速为-30。
参考程序#
参考程序连接:https://makecode.microbit.org/_gFiciE4PLF37
你也可以通过下方网页直接下载程序。
--- **注意:** 设置速度过低时会造成电机运转不正常。现象#
mBot小车在检测到墙面距离大于50cm,蜂鸣器以4节拍蜂鸣,电机全速。
小于50cm大于10cm时,蜂鸣器以1/2节拍蜂鸣,电机速度降低一半慢速前进。
小于10cm,蜂鸣器长鸣,电机停止。
思考#
为什么在停车中要判断距离是否为0?
常见问题#
问:为什么开启5X5点阵屏后,会导致无法避障?
答:LED点阵显示会严重拖慢程序运行速度,导致小车检测障碍物不及时,要使程序流畅运行,建议禁用5x5显示屏。