Case 08: The Robot Arm
Contents
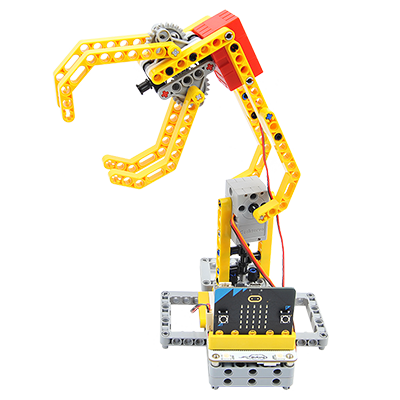
10. Case 08: The Robot Arm#
10.1. Purpose#
To make a robot arm.
10.2. Link#
10.3. Materials Required#
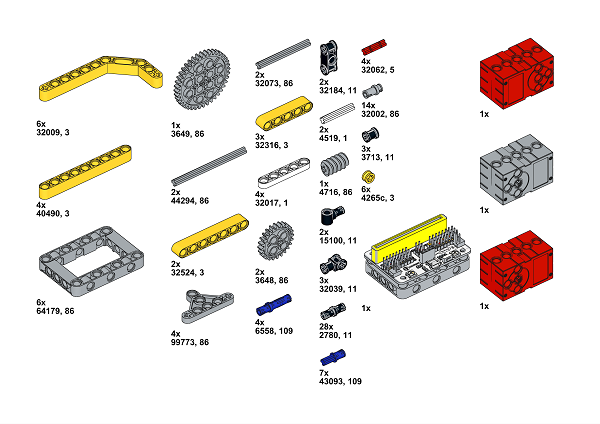
Video link: https://youtu.be/IRJKXAfJf9M
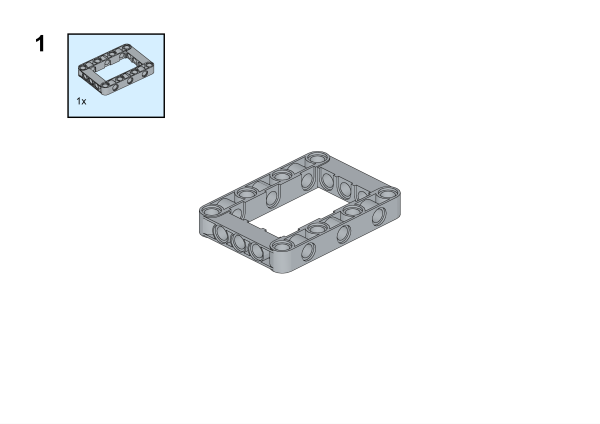
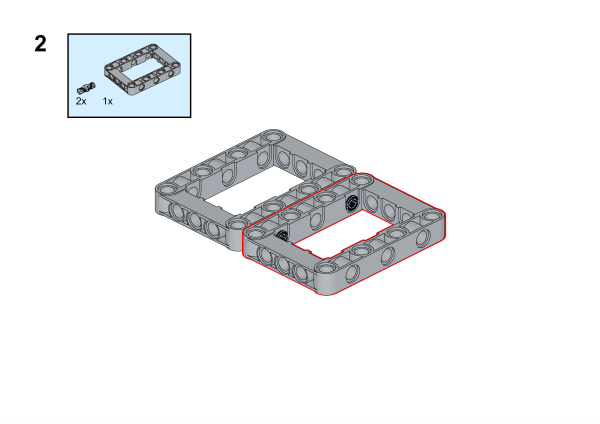
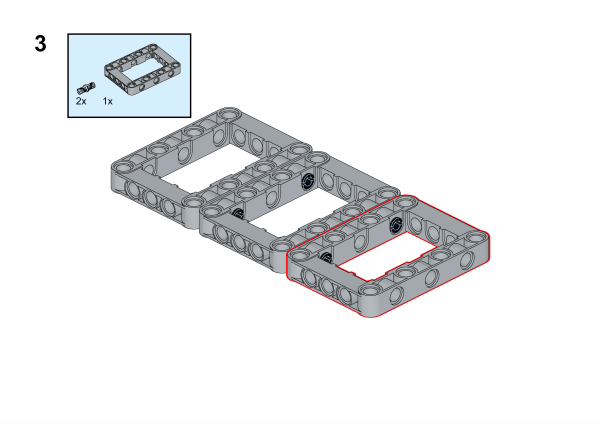
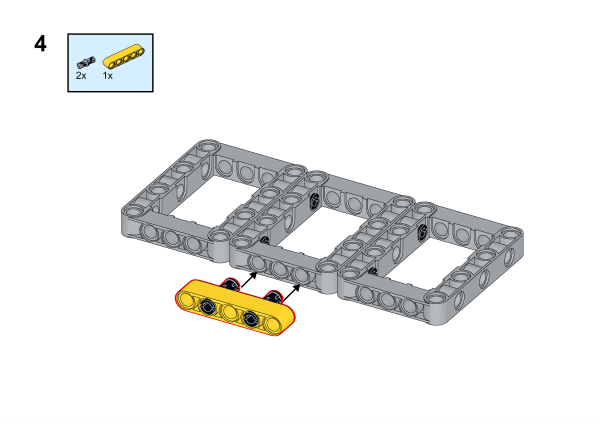
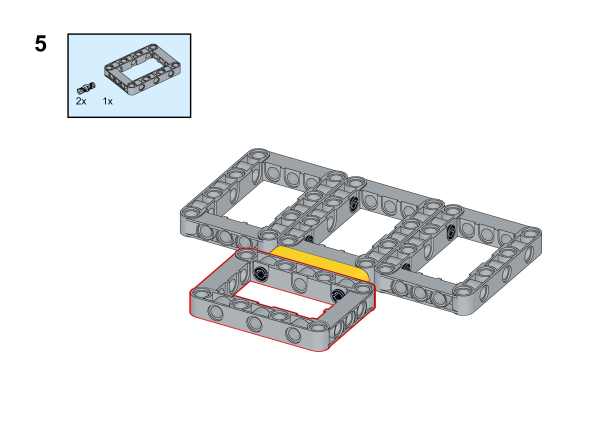
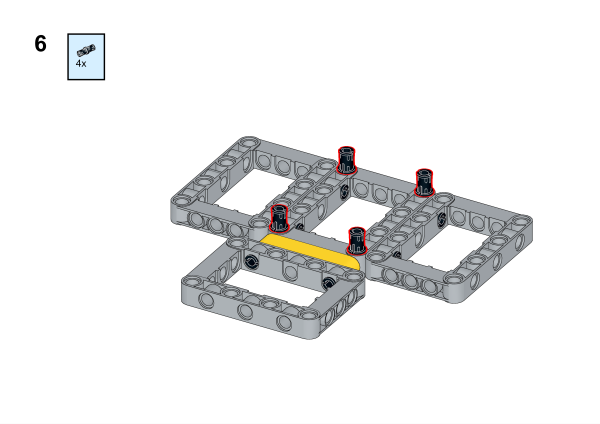
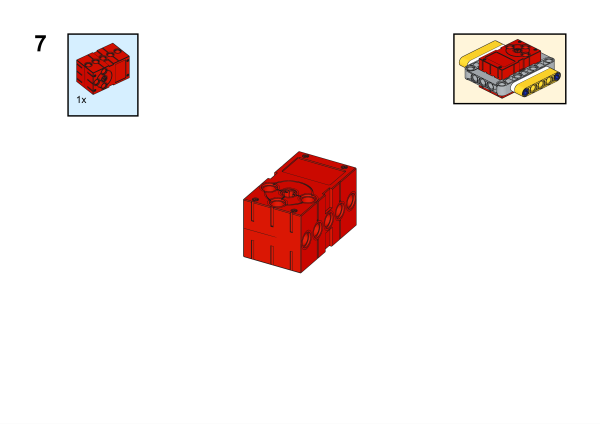
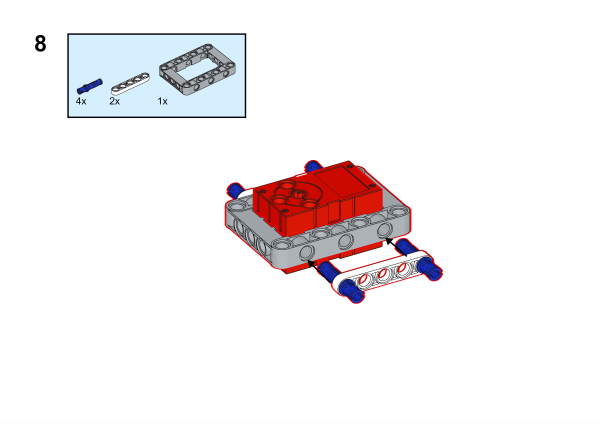
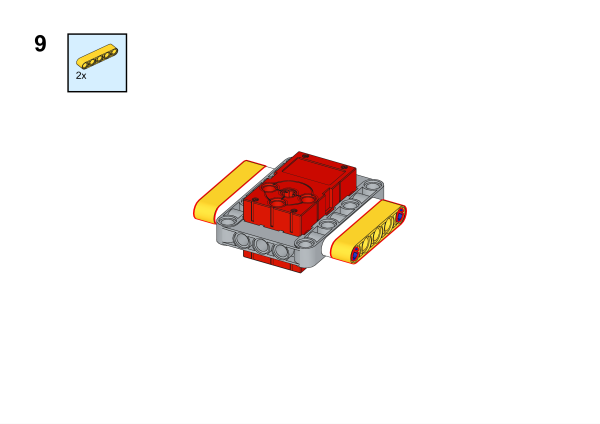
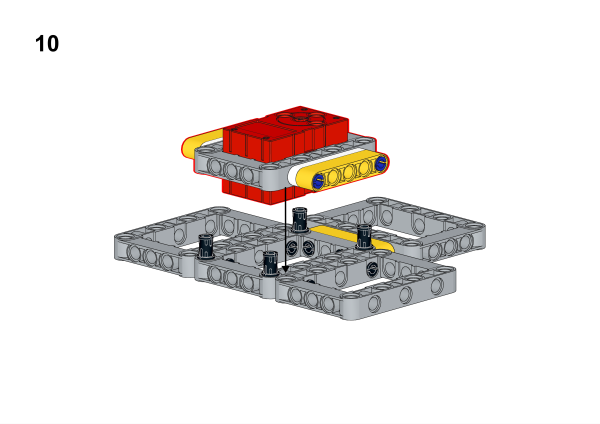
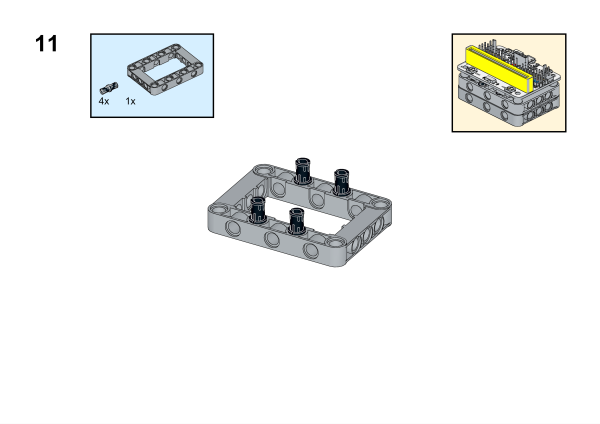
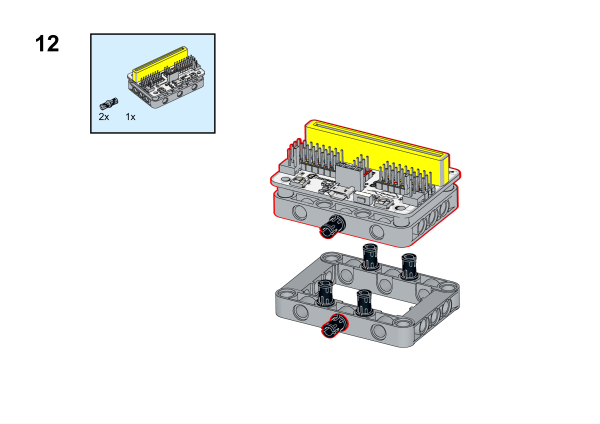
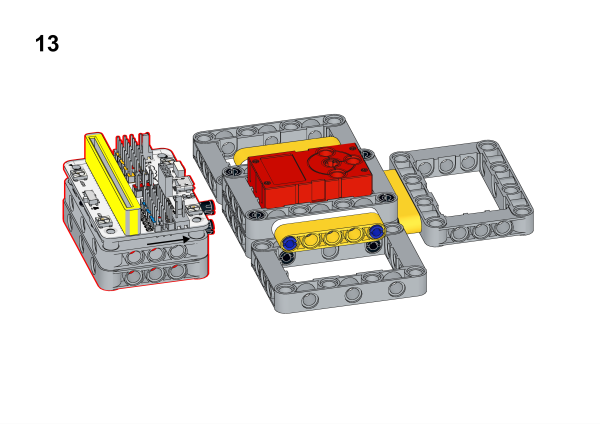
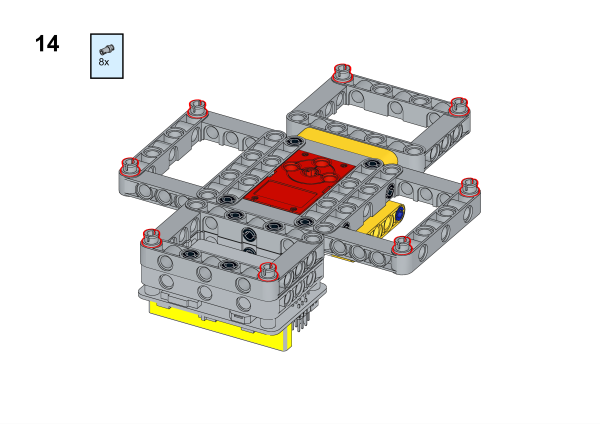
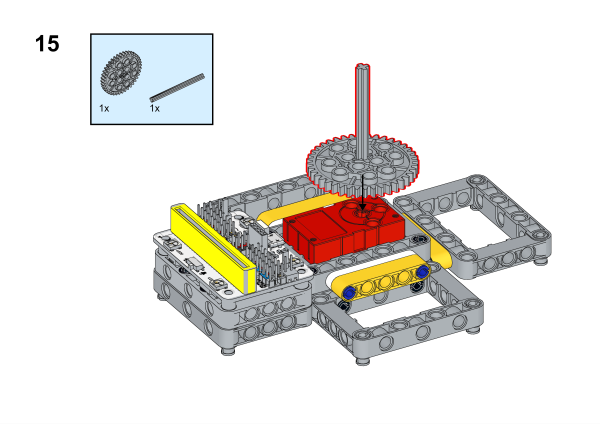
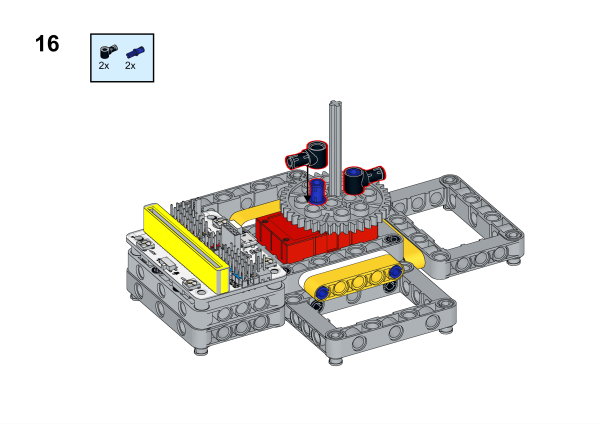
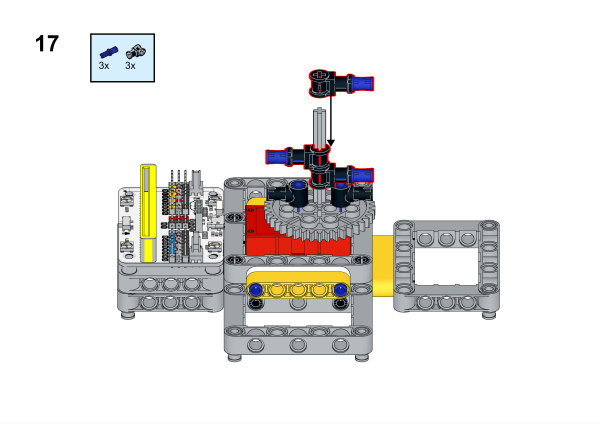
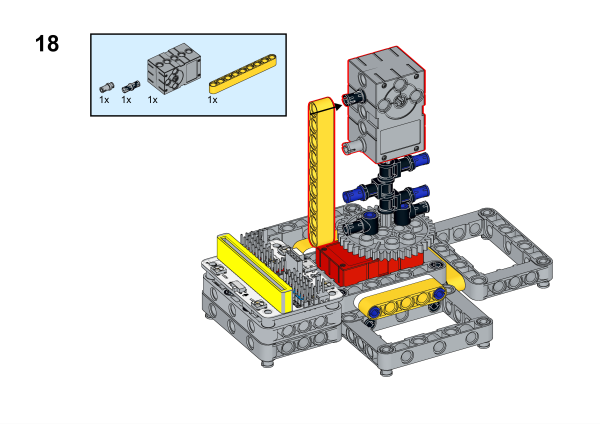
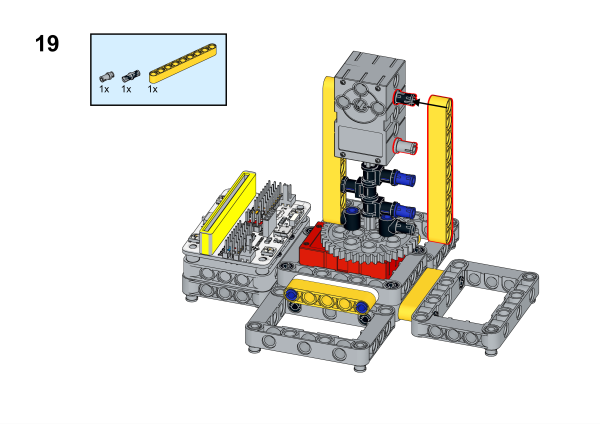
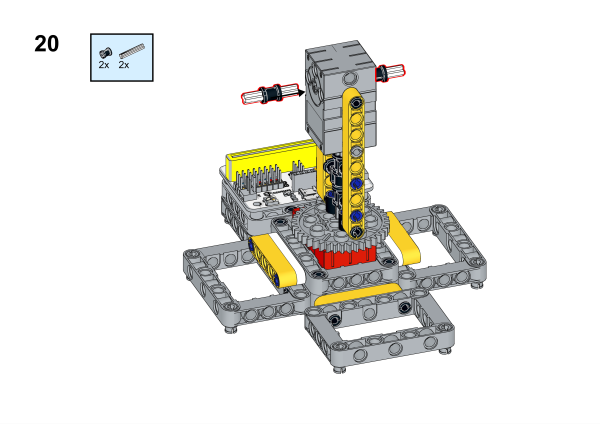
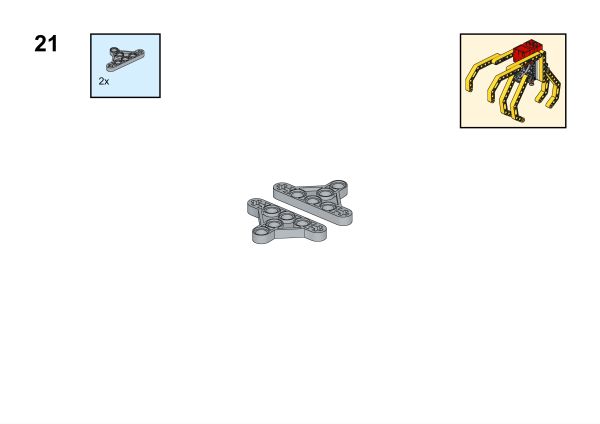
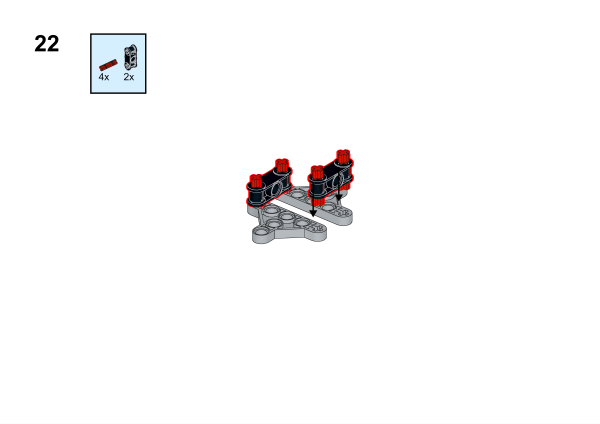
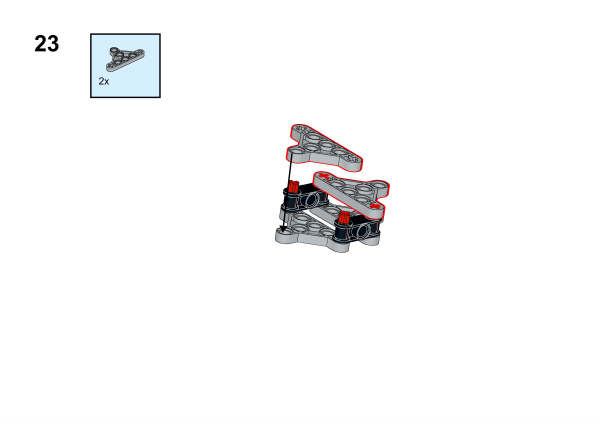
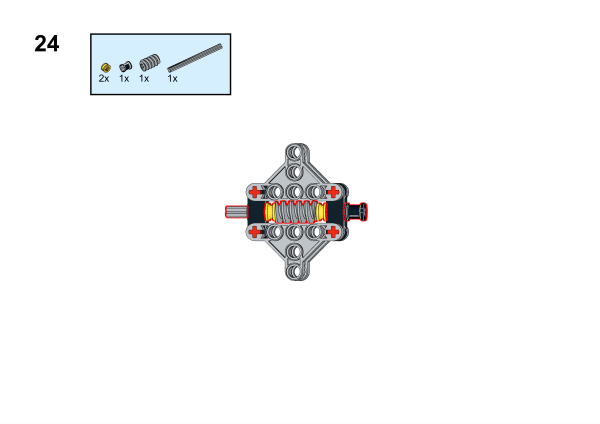
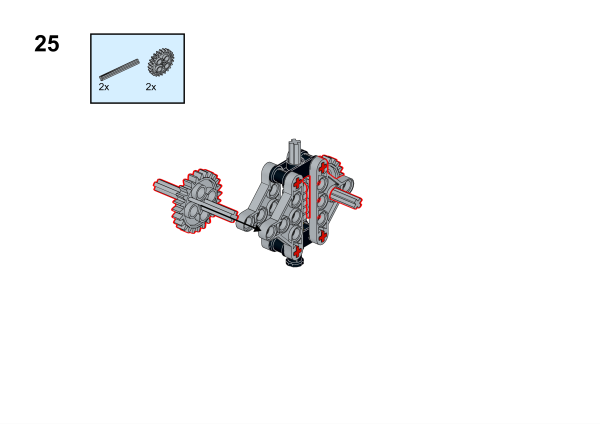
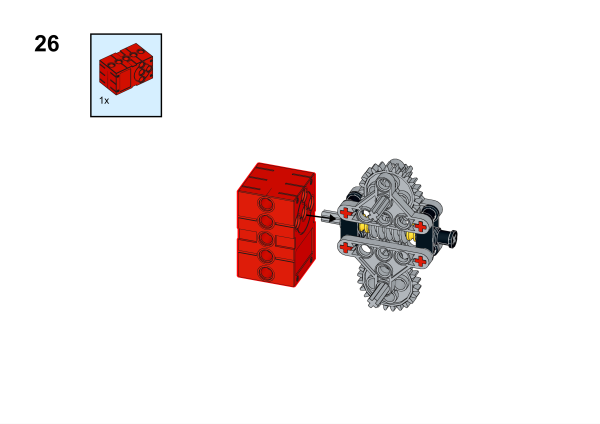
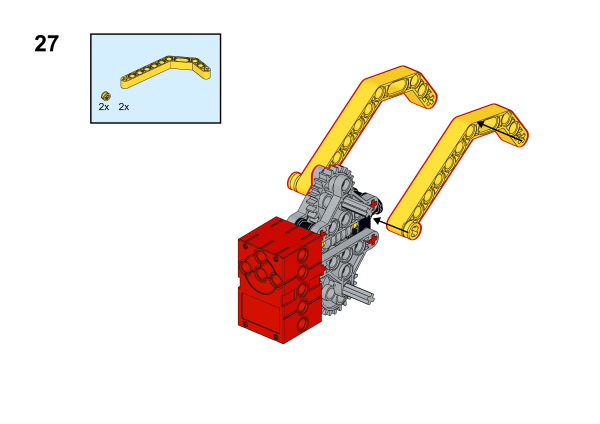
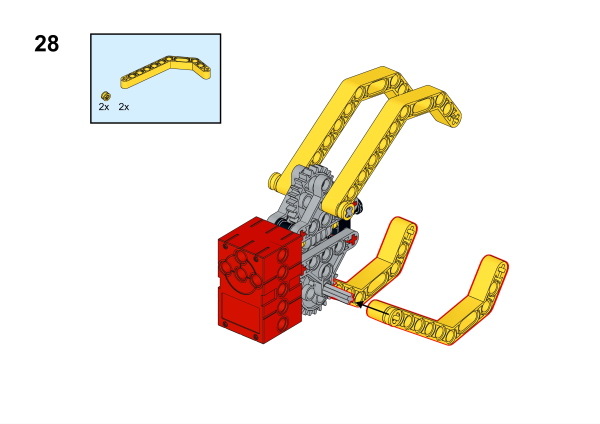
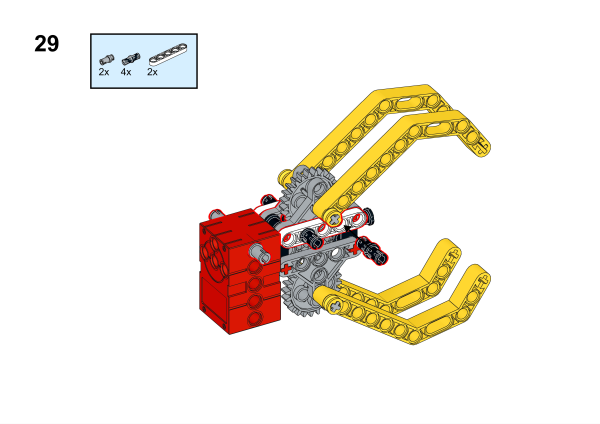
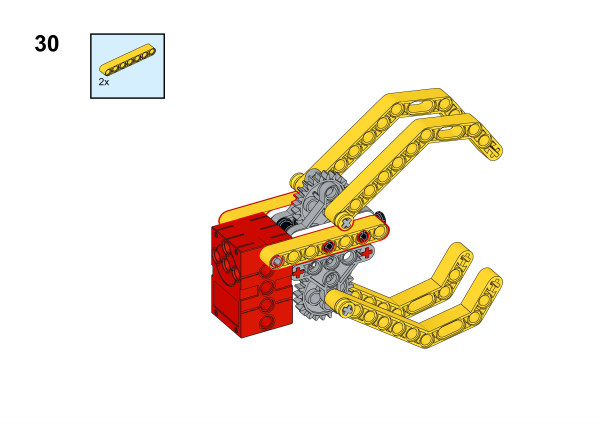
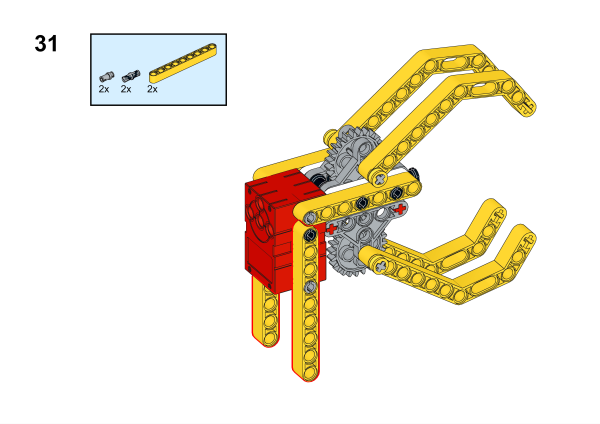
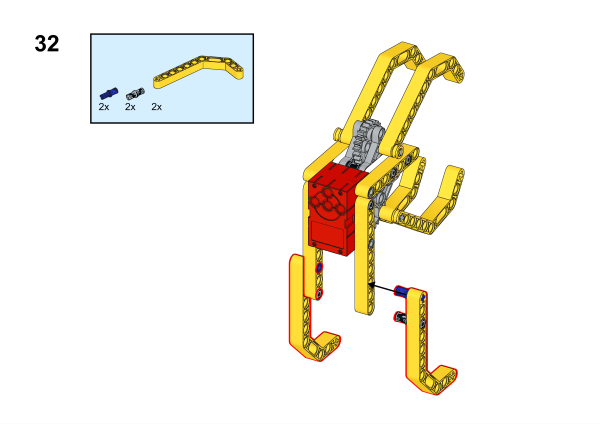
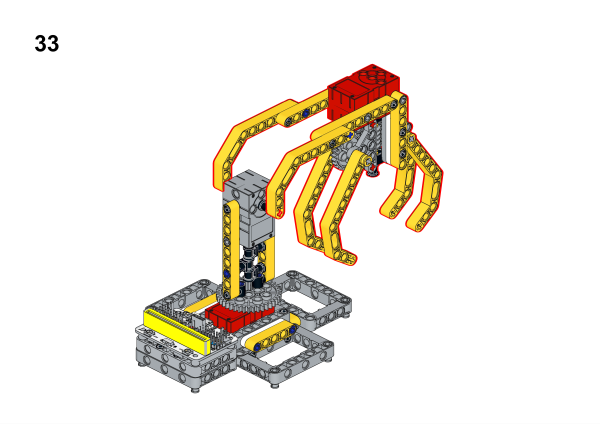
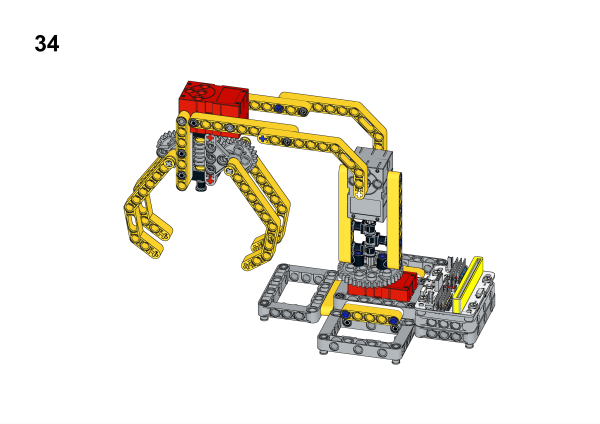
10.4. Bricks build-up#
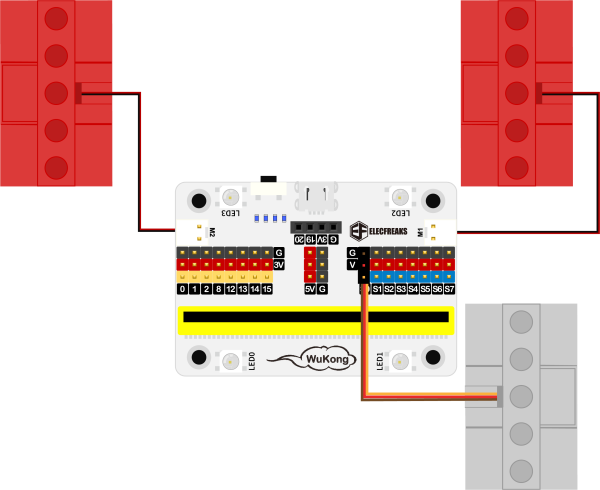
10.5. Hardware Connection#
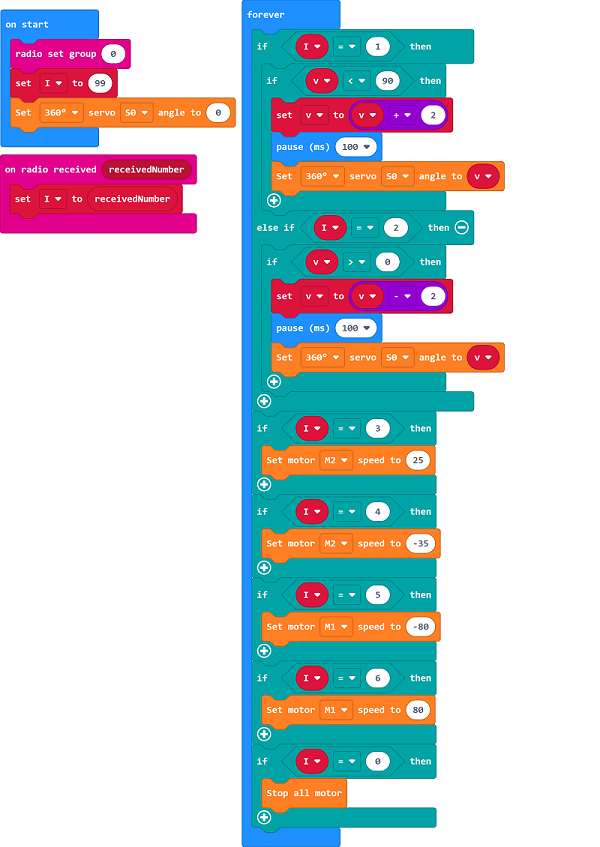
Connect two motors to M1 and M2, the servo to S0 ports on Wukong breakout board.
10.6. Software Platform#
10.7. Coding#
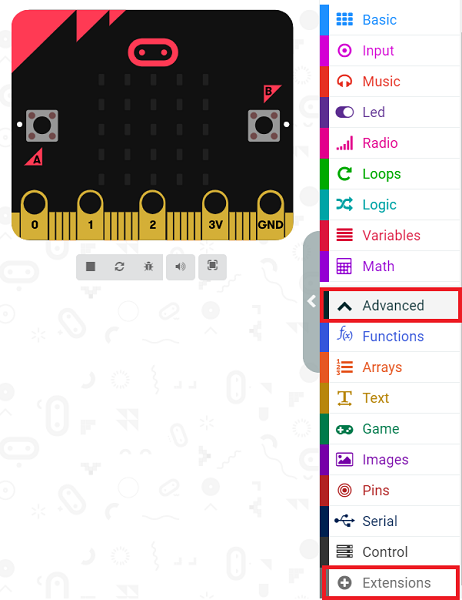
Add extensions#
Click “Advanced” in the MakeCode to see more choices.
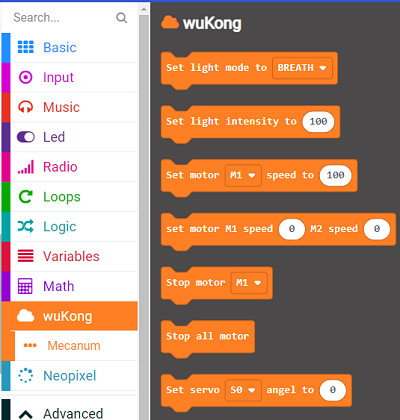
Search with Wukong in the dialogue box to download it.
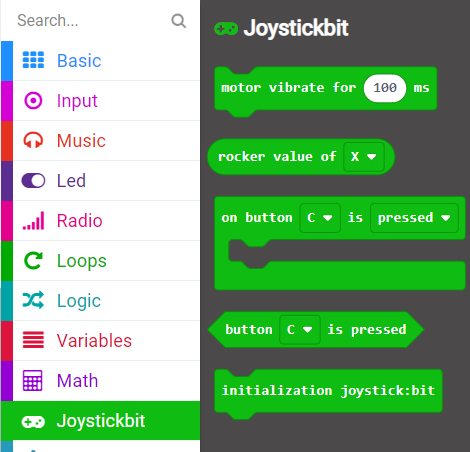
Search with joystickbit in the dialogue box to download it.
Program#
For Joystick:bit:
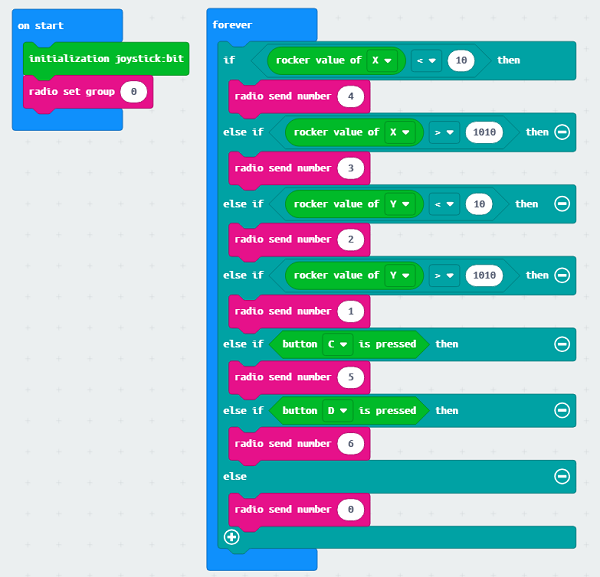
Link:https://makecode.microbit.org/_3mK9cbULkLCy
For the robot arm:
Result#
Control the robot arm with the Joystick:bit, the left and right direction of the handle rocker controls the rotation of the robot arm to the left and right, the up and down direction of the handle rocker controls the rise and fall of the robot arm, the C button controls the clamping of the robot arm, and the D button controls the release of the robot arm clamp.