

Introduction
This is a simple “swimming robot”. Of course, it can’t swim in the water but is able to move on the ground by “swinging” its arm. This project mainly aims to guide children to think about how to speed up by using different materials and the touching places to the ground.
Materials Required
micro:bit X 1
USB cable X 1
RJ11 Cable X 1
Geek Motor X 1
Assembly
Bricks Build-up:
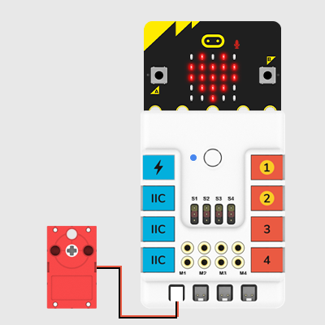
Connect Nezha breakout board with the devices.
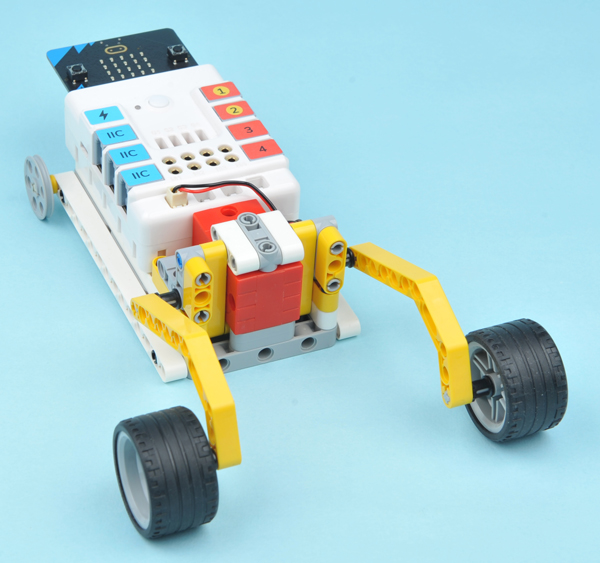
Connect motor to M1.
Functions
Program to drive the robot forward by pressing the buttons on micro:bit.
Click “Advanced” in the MakeCode to see more choices.
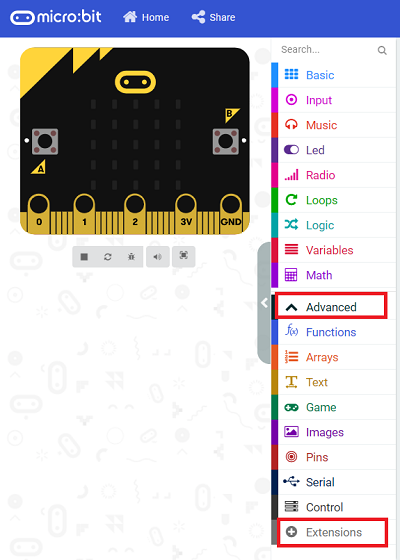
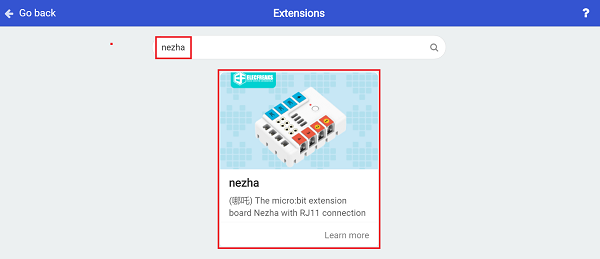
For programming, we need to add a package: click “Extensions” at the bottom of the MakeCode drawer and search with “nezha” in the dialogue box to download it.
Notice: If you met a tip indicating that some codebases would be deleted due to incompatibility, you may continue as the tips say or create a new project in the menu.
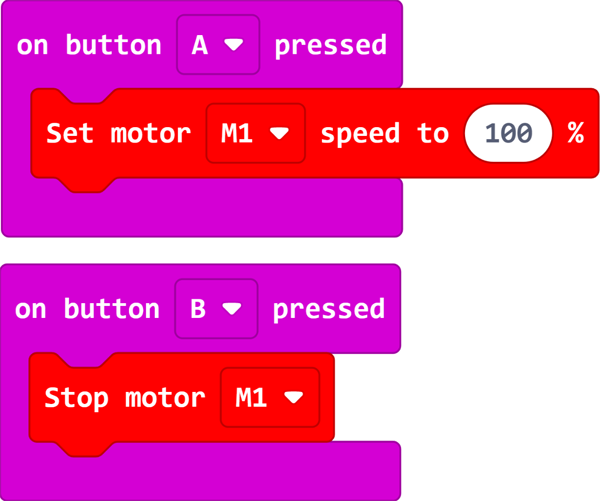
Program:
Link: https://makecode.microbit.org/_av1Mdb3i5Ybd
Result
Press button A to drive the robot and button B to stop.


