多功能扩展板:悟空(Wukong)
Contents
11. 多功能扩展板:悟空(Wukong)#
11.1. 简介#

悟空 是一款基于micro:bit的高集成度多功能扩展板,它的大小与micro:bit相近,功能十分丰富,集成了蜂鸣器、舵机驱动、电机驱动等。 自带400mAh锂电池包,板载电源管理系统,支持快速充电,充满仅需20分钟,满负载运行时间可达到40分钟以上。 扩展板底座为乐高标准 7 X 5 方形积木块,完美接入乐高积木。

11.2. 购买链接#
11.3. 特性#
外形小巧,高集成度
标准乐高积木接口
以GVS端子形式扩展出大部分IO口
单独引出IIC接口,能直接插入OLED、BME280等IIC器件。
集成蜂鸣器和蜂鸣器开关。
集成电机驱动电路。
集成舵机驱动电路。
支持5V传感器工作。
自带锂电池包,集成电池管理系统,四颗LED灯指示电量。
电源电路支持快充。
11.4. 参数#
| 参数 | 详情 | 说明 | 备注 |
|---|---|---|---|
| 产品编号 | EF08207 | SKU | - |
| 尺 寸 | 40.00 X 58.12 X 24.53 mm | 高度包含乐高底座,不包含主板 | 手工测量,以实物为准 |
| 重 量 | 41.6g | 包含底座,包含锂电池包 | 手工测量,以实物为准 |
| 电源系统 | 单击电源开关开机,双击关机 | 4颗LED灯指示电量,电路支持快充 | 也可通过板载USB口供电 |
| 供电电池 | 400mAh聚合物锂电池 | 快充20分钟,满载工作40分钟以上 | 安全防爆 |
| 工作电压 | 3.7v~5v | 锂电池供电3.7v,USB口直供5v | - |
| 工作温度 | -20℃~60℃ | 充电温度0℃~40℃ | - |
| 电机驱动 | 2路 (M1,M2) | 板载电机驱动电路驱动 | 5V |
| 舵机驱动 | 8路舵机接口 (S0~S7) | 板载舵机驱动电路驱动 | - |
| IO口引出 | P0、P1、P2、P8、P12、P13、P14、P15、IIC | 支持拖动3V和5V器件 | GVS端子 |
| Rainbow LED | LED0、LED1、LED2、LED3 | 扩展Rainbow LED库使用 | 连接到micro:bit引脚P16 |
| 蜂鸣器 | 无源蜂鸣器,板载功能开关 | 使用music库驱动 | 连接到micro:bit引脚P0 |
| 氛围灯 | 反面边缘8颗LED灯,编程控制 | 常亮,闪亮,呼吸灯效果 | 开机时会闪亮一次,为正常现象 |
| 乐高底座 | 标准7 x 5 长方形底座 | 电池包镶嵌底座中央 | - |
注意:为防止电池过充或者过放导致电池鼓包。如果有长时间不使用的情况,请将电池卸下;在电池充满电时,请及时拔掉电源线,防止过充。
11.5. 外型与定位尺寸#

11.6. 主要模块介绍#
开关,usb供电口及电量指示灯#

micro:bit主板插销#

电机驱动接口#

3V舵机驱动接口#

8路标准GVS接口及5v接口#

I2C排母接口#

4颗Rainbow LED#

蜂鸣器(背面)#


注意:
| 硬件版本 | 蜂鸣器开关 | 蜂鸣器 |
|---|---|---|
| V1.0 | 有 | 有 |
| V1.2 | 无 | 无 |
| V1.4 | 无 | 无 |
| V2.0 | 无 | 有 |
8颗氛围灯(背面)#

锂电池接口(背面)#

乐高固定螺丝孔M3(背面)#

11.7. 快速上手#
硬件连接#
将micro:bit主板插入主板插销座,主板带LOGO一面,朝向蜂鸣器开关一侧。
单击一次电源开关打开电源。

软件编程平台(makecode)#
添加专属积木块库#
点击高级
Advanced,在下拉菜单中点击扩展Extensions,进入添加积木块菜单。
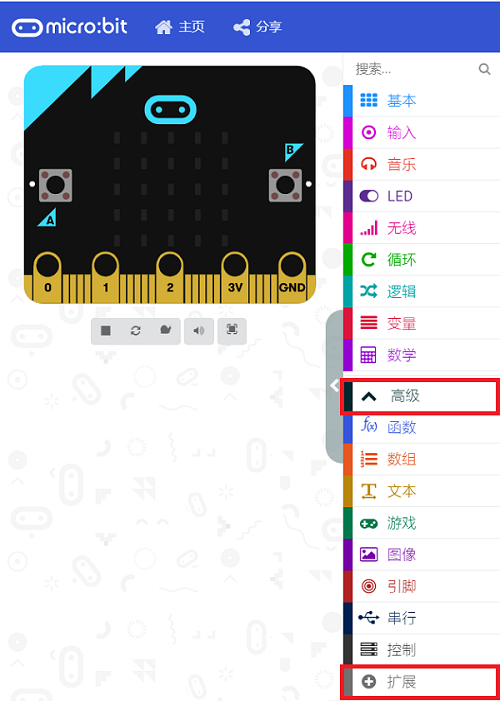
在搜索框中搜索
wukong,点击图片中wukong,添加扩展包。添加完成。

11.8. 使用方法#
开机及充电方法#
创新电源开关,单击电源开关开机,电源指示灯亮起。
双击电源开关,关机,电源指示灯熄灭。
将USB电源线连接至充电接口,常亮灯为当前所剩电量,剩余灯依次点亮则进入充电模式。
电源指示灯状态:
正常状态: 1.指示灯显示电量 2.已开机状态下拔出microbit时,指示灯闪烁三次后关机
充电状态: 1.当前电量的灯常亮,在充电的灯闪烁 2.充满时四颗灯常亮 3.已开机状态下拔出microbit时,指示灯闪烁三次后关闭电机和舵机电源
驱动呼吸灯#
悟空扩展板底板有8颗蓝色LED呼吸灯,可以控制其开关或者亮度。
参考程序连接:https://makecode.microbit.org/_4ub57g5FuJ1v;你也可以通过下方网页直接下载程序。
驱动电机#
悟空扩展板有两路电机驱动端口分别为M1和M2,可以连接市面上常用的电机。
参考程序连接:https://makecode.microbit.org/_78keCLdmU1Ez,你也可以通过下方网页直接下载程序。
驱动蜂鸣器#
悟空扩展板带有一个蜂鸣器,位置在底板下方,已经连接micro:bit主板的P0口,可以直接使用
音乐积木块驱动,同时可以拨动正面的蜂鸣器开关来启用或者禁用蜂鸣器功能。
参考程序连接:https://makecode.microbit.org/_JmM5btU4dHUb
你也可以通过下方网页直接下载程序。
驱动彩虹灯#
悟空扩展板上拥有4颗彩虹灯,分为LED0、LED1、LED2、LED3,已经连接至micro:bit主板的P16口,可以使用悟空扩展库里流光溢彩灯积木块驱动使用。
参考程序连接:https://makecode.microbit.org/_61T2w6cqTib0
你也可以通过下方网页直接下载程序。
驱动舵机#
将舵机连接至舵机驱动接口S0~S7,使用Wukong扩展库中的舵机积木块进行驱动。
180度舵机可以设置舵机角度0~180度。
360度舵机设置0度为正转最大速度,180度为反转最大速度,90度为停止,0~90度和90~180度为速度调制范围。
参考程序连接:https://makecode.microbit.org/_6Pw63w49u5qq
你也可以通过下方网页直接下载程序。
5V电源引脚使用#
在悟空扩展板的中间有一组3对5V的电源接口,可以驱动5V的传感器或者5V的舵机,只需要将5V模块的供电接口连接至5V电源接口,信号线连接至舵机信号线口或者传感器信号线口。

软件编程平台(Python editor)#
添加.py文件#
下载压缩包并解压EF_Produce_MicroPython-master 打开Python editor
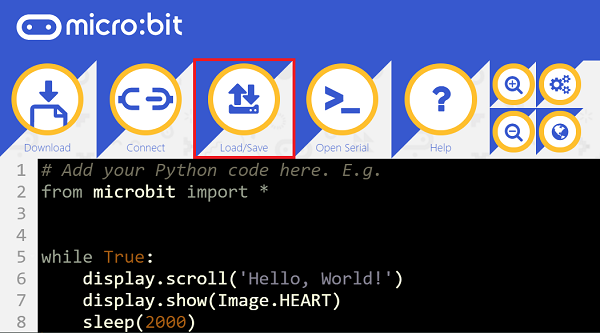
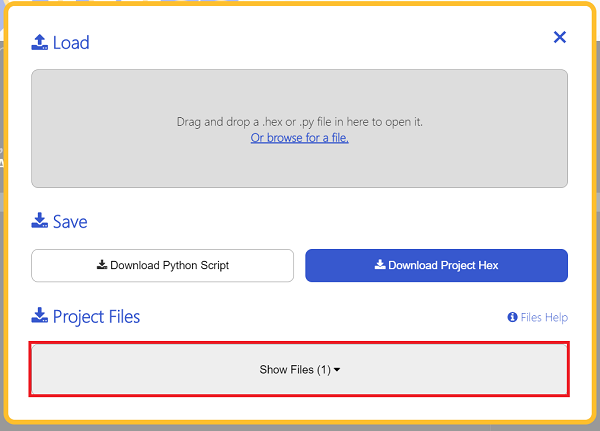
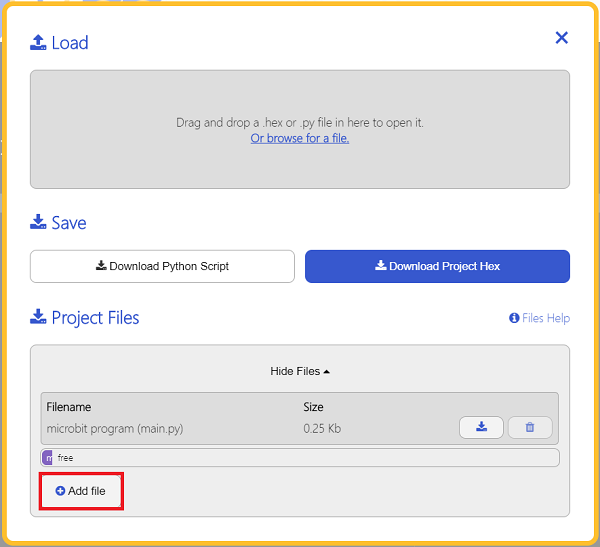
为了给悟空扩展板编程,我们需要添加Wukong.py文件。点击Load/Save,然后点击Show Files(1)下拉菜单,再点击Add file在本地找到下载并解压完成的EF_Produce_MicroPython-master文件夹,从中选择Wukong.py文件添加进来。

11.9. 使用方法#
驱动呼吸灯#
悟空扩展板底板有8颗蓝色LED呼吸灯,可以控制其开关或者亮度。
切换呼吸灯模式(将set_light_breath(True)的true改为False,可关闭呼吸灯)
from microbit import *
from Wukong import *
wk = WUKONG()
wk.set_light_breath(True)
调节呼吸灯亮度
from microbit import *
from Wukong import *
wk = WUKONG()
wk.set_light(100)
驱动电机#
悟空扩展板有两路电机驱动端口分别为M1和M2,可以连接市面上常用的电机。
电机正转两秒,然后反转两秒
from microbit import *
from Wukong import *
wk = WUKONG()
while True:
wk.set_motors(1, 100)
wk.set_motors(2, 100)
sleep(2000)
wk.set_motors(1, -100)
wk.set_motors(2, -100)
sleep(2000)
驱动舵机#
将舵机连接至舵机驱动接口S0~S7,使用Wukong扩展库中的舵机积木块进行驱动。
180度舵机可以设置舵机角度0~180度。
360度舵机设置0度为反转最大速度,180度为正转最大速度,90度为停止,0~90度和90~180度为速度调制范围。
from microbit import *
from Wukong import *
wk = WUKONG()
while True:
wk.set_servo(0, 0)
sleep(2000)
wk.set_servo(0, 180)
sleep(2000)